European Robotic Arm (ERA)

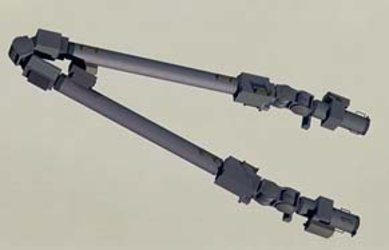
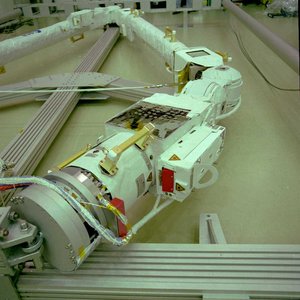
The European Robotic Arm [ERA] is a relocatable manipulator arm for space applications. This video, made in 1999 prior to its launch shows how ESA developed ERA for the International Space Station [ISS]. The purpose of ERA is to assemble and maintain the various elements of the Russian segment of the ISS with the help of a cosmonaut in Extra-Vehicular Activity [EVA]. This video provides background footage on the development and testing of ERA at Fokker Space, Leiden, and ESA/ESTEC, Noordwijk; ERA deployment graphics; ISS graphics showing elements contributed by participating countries; and interviews with ERA project experts, Uwe Berkes (ESA), and Caspar Hofkamp (Fokker Space). This A-roll features soundbites by ERA experts, Uwe Berkes (ESA), and Caspar Hofkamp (Fokker Space), on the development of ERA. Footage is arranged as follows: 3-D graphics of Japanese contribution to ISS; 3-D graphics of Russian contribution to ISS; 3-D graphics of American contribution to ISS; 3-D graphics of European contribution to ISS; first movements of ERA joints on flat floor facility at Fokker Space; integration of ERA in flat floor facility, Fokker Space; first movements of ERA in flat floor fcility, Fokker Space; ERA during testing at Large Space Simulator (LSS), ESA/ESTEC, Noordwijk, Netherlands; underwater training facility; launch of Russian Proton, Baikonur, Russia, November 1998.