Laboratories
Advanced missions need advanced testing.
To save time and money, we offer external partners a unique infrastructure, which would not make economic sense to develop multiple times at multiple places for single missions
We have pooled resources to establish and develop world-beating test facilities that are available to all European space – and, indeed, non-space – companies or organisations.
ESA’s own R&D activities and technical standard-setting are supported through specialist technical teams as well as a suite of well-equipped laboratories at ESTEC and across a number of Member States that focus on all aspects of the space environment.
For missions, the labs examine each item, instrument and piece of software to be used in space, both individually and in conjunction, verifying its suitability for use by simulating the conditions experienced in space or during launch as closely as possible.
The labs’ work is not finished once a satellite is in orbit. They remain at the disposal of project teams to advise on the causes of mission anomalies, research potential fixes and disseminate lessons learned. These labs are available to service ESA missions and projects and to support research institutions and companies of ESA Member States.
1WORLD–CLASS TEST CENTRE
35LABORATORIES
22EXTERNAL STRATEGIC PARTNERSHIP WITH LABORATORIES IN ESA MEMBER STATES
50DIFFERENT FIELDS OF EXPERTISE
10COMPETENCE DOMAINS
Search the lab you need using the service or competence domain filter:
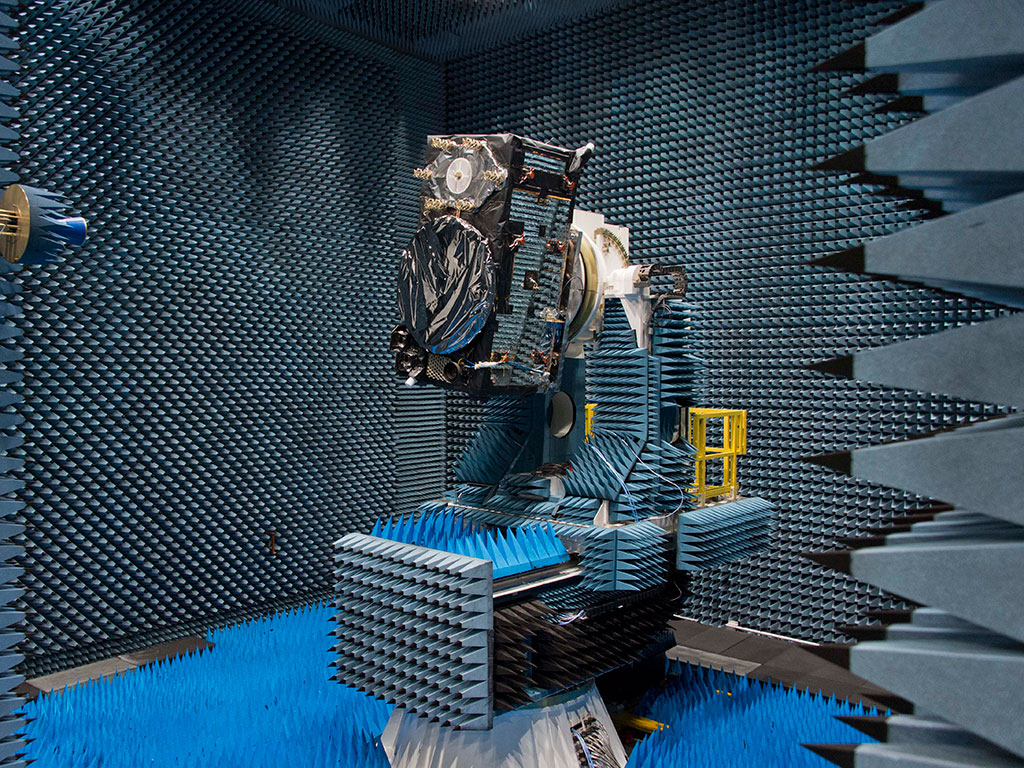
Antenna Laboratory
At ESTEC, ESA operates some of the largest European test facilities dedicated (but not limited) to the testing of space hardware. Among these is the Antenna Laboratory
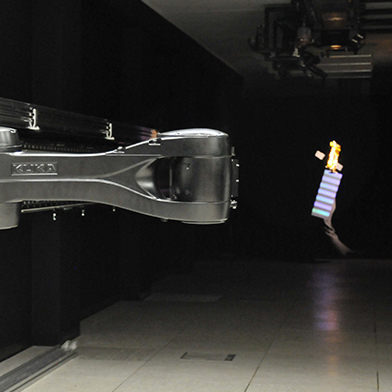
Automation and Robotics Laboratories
ESA's Automation and Robotics group is responsible for the creation and maintenance of an industrial technology base for the automation and remote control of space based operations. As such, the domain of competence of the group includes the specification and control of space robotics systems (from manipulators to autonomous vehicles) and laboratory supporting automation and robotics in manned and unmanned missions.

Communication and TT&C Laboratory
The Communication and Tracking, Telemetry, and Command (TT&C) Laboratory develops advanced telecommunication systems, techniques and technologies for communications.

Concurrent Design Facility
The Concurrent Design Facility (CDF) provides a collaborative, cooperative, collective and simultaneous engineering working environment.

Data Systems and Microelectronics Laboratory
The Data Systems and Microelectronics Laboratory is a joint undertaking across the Microelectronics Lab and the On-Board Computers and Data Handling Lab
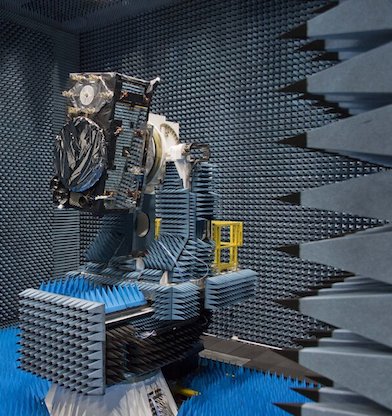
Electromagnetic Compatibility (EMC) Laboratory
The Electromagnetic Compatibility (EMC) Laboratory serves for EMC testing and measurements as well as for magnetic cleanliness verification

ESA Propulsion Laboratory
ESA Space Power Laboratory
In operation since the 1970s, the European Space Power Laboratory is among Europe's leading facilities of this kind.

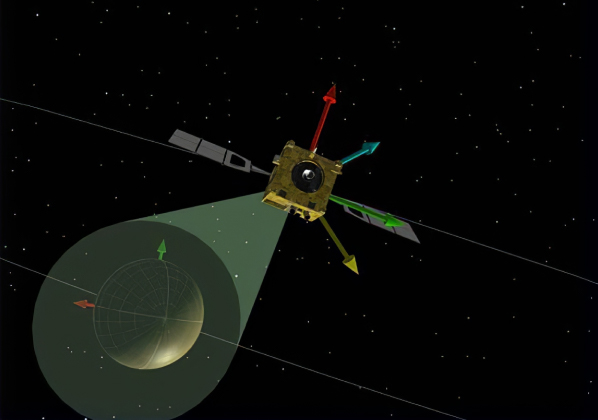
GNC, AOCS & Pointing Laboratory
The Guidance Navigation and Control (GNC), Attitude Orbit Control (AOCs) & Pointing Laboratory supports engineering research, evaluation and investigations for ESA Projects and R&D Programs through prototyping, characterisation and testing of the products related to GNC, AOCS and pointing systems.
High Power Radio Frequency and Materials Laboratory

Our facilities share the same goal:
To enable and support future missions and keep Europe’s tech industry competitive.
We support the development of the newest technologies for Europe.