
Agency
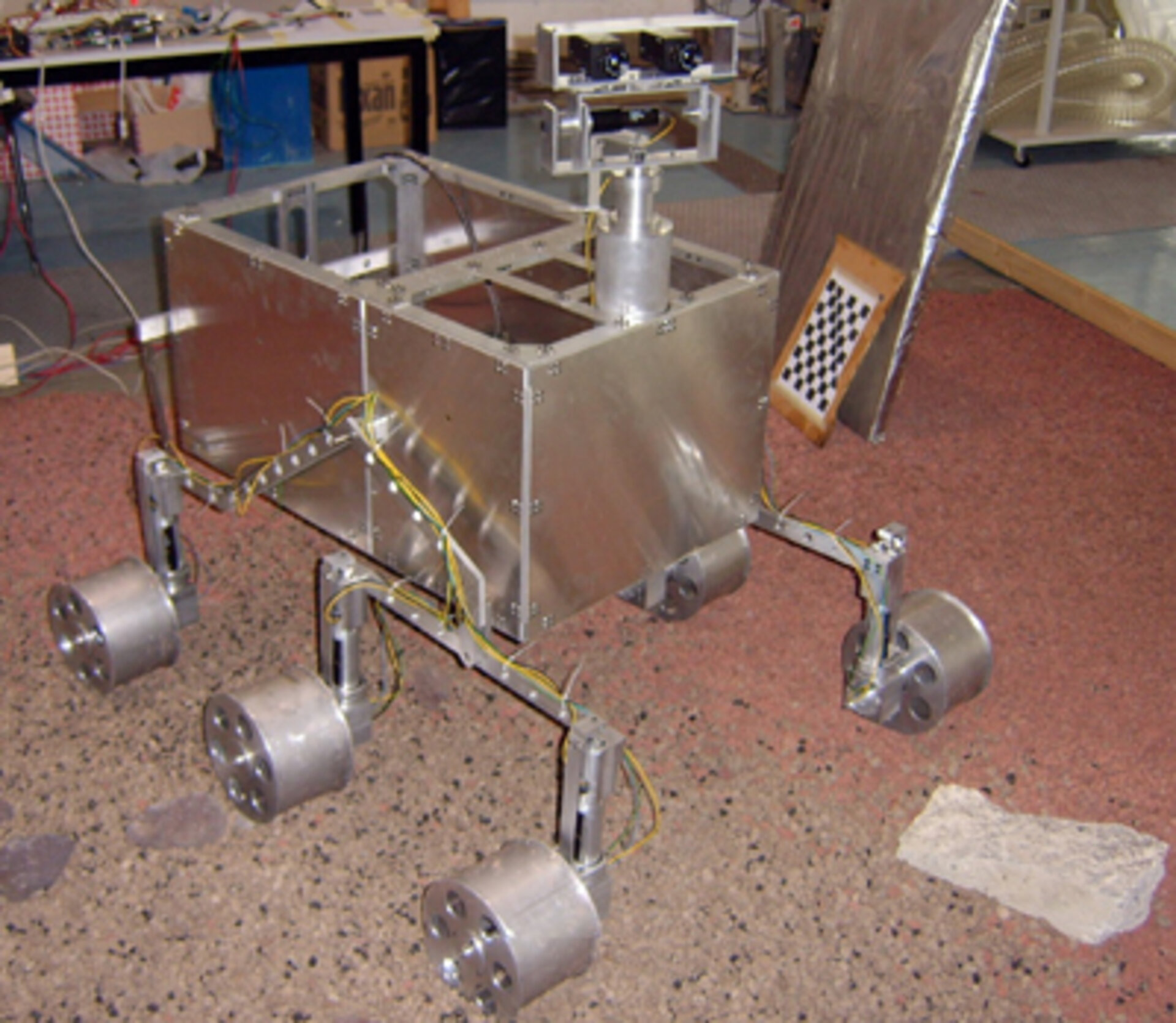
Multisensor autonomous rover
An ITI project developed an innovative control system for a planetary rover. It is based on an artificially intelligent cognitive system that integrates data from a multi-sensor system with three different layers of data interpretation. This can be used to continuously ‘see’ the surroundings and help the rover to drive around rocks and other obstacles.




