Agency
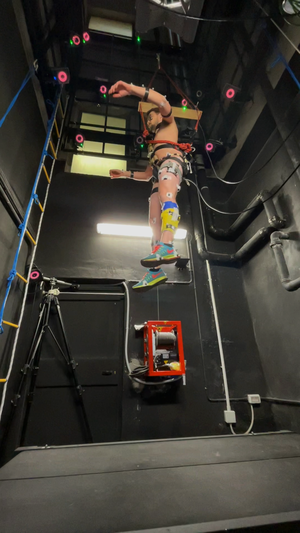
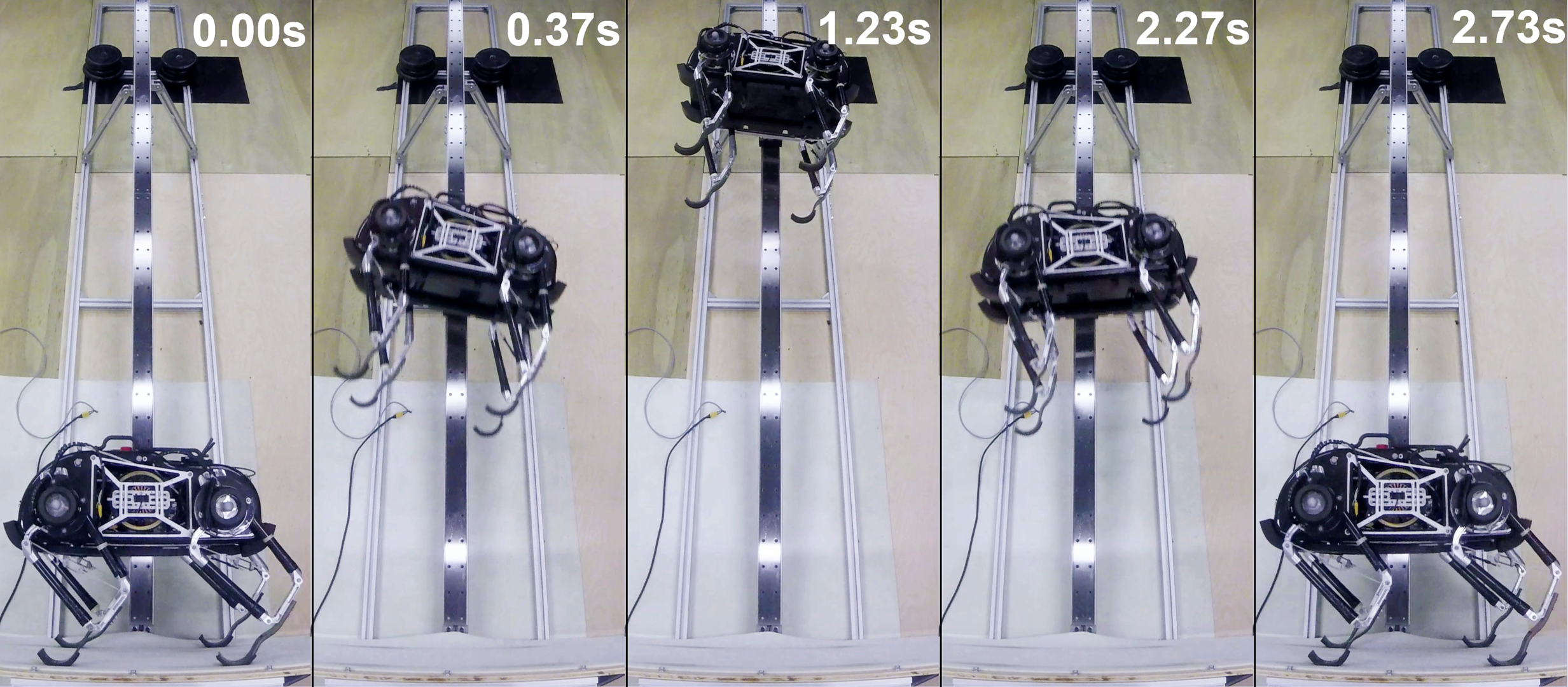
Spacebok jumping in simulated lunar gravity
SpaceBok is a quadruped robot designed and built by a Swiss student team from ETH Zurich and ZHAW Zurich. It is currently being tested using robotic facilities at ESA’s ESTEC technical centre in the Netherlands. The robot is being used to investigate the potential of ‘dynamic walking’ to get around in low gravity environments. Test rigs have been set up to simulate various gravity environments. SpaceBok could potentially go up to 2 m high in lunar gravity, although such a height requires the robot to stabilise itself with a reaction wheel come down again safely.