Learning-based grasping strategy for soft robotic arms to capture space debris
Background
The increasing accumulation of defunct satellites, rocket stages, and fragmentation debris in Earth’s orbit poses a serious threat to the sustainability of space operations. Collisions between such objects can trigger cascading fragmentation events, the Kessler syndrome, that may render orbital regions unusable [1]. To address this, Active Debris Removal (ADR) has been identified by space agencies as a key strategy for maintaining a safe orbital environment. Traditional ADR concepts such as nets, harpoons, and tethered robots each offer viable solutions that can be tailored to specific mission scenarios. Robotic manipulators represent an alternative approach that enables precise, reusable operations, but rigid-arm platforms can be less suited for non-cooperative or tumbling debris, whose shape and dynamics are often uncertain [2]. Recent research has therefore focused on bio-inspired and soft robotic solutions, which take advantage of compliance and adaptability to perform safe interactions. Inspired by natural systems, such as gecko adhesion [3], crab claws [4], or elephant trunks [5], soft robots can conform around irregular targets, distribute contact forces, and absorb impacts, making them ideal for capturing uncooperative objects in orbit.
Project goal
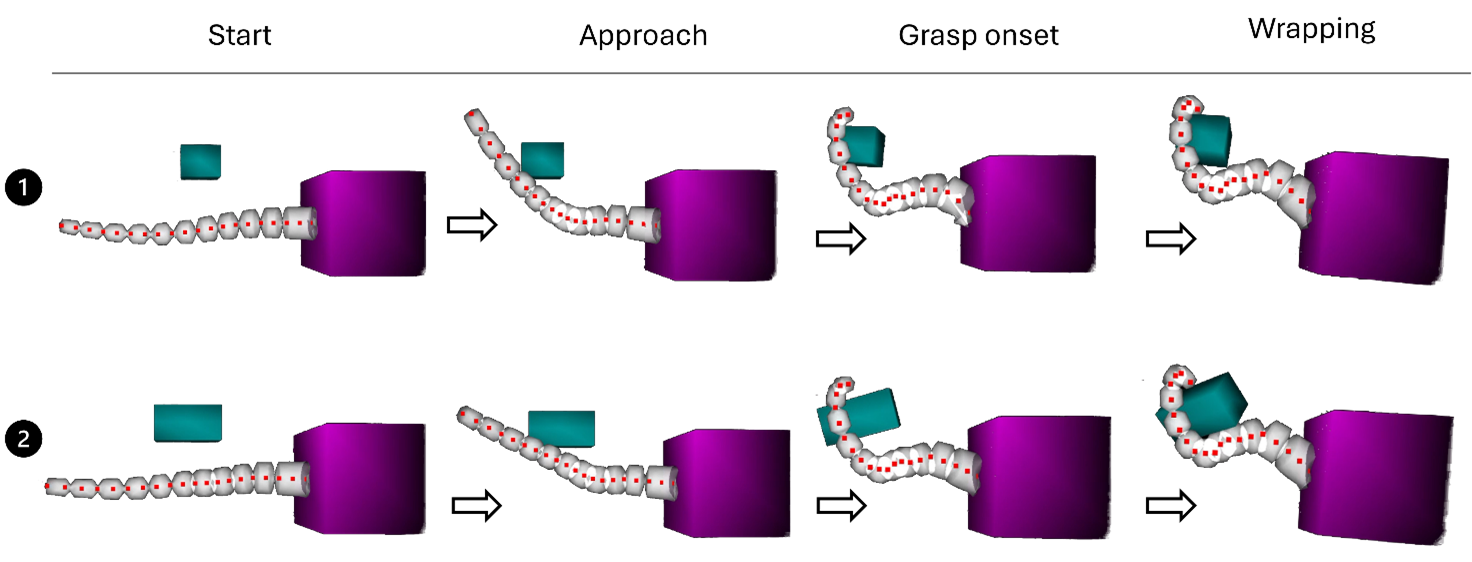
This project develops a learning-based framework for space debris capture using a soft robotic arm capable of bio-inspired whole-arm grasping. The approach combines Finite Element Method (FEM) simulations for accurate modeling of soft-body dynamics with deep Reinforcement Learning (RL) to enable the robot to autonomously learn grasping strategies. A Curriculum Learning (CL) scheme, inspired by the movement of the elephant trunk, guides the robot through two sequential phases, approach and wrapping, to improve convergence and robustness. Validated in zero-gravity simulations, the framework achieved a 14% higher success rate than standard RL, demonstrating stable grasps of cuboidal debris across varying sizes and robustness to external disturbances (see Fig. 1). The learned strategy also generalized to more complex targets, such as satellites equipped with handles, reaching a 63% success rate. By merging soft continuum robotics with machine learning, this work represents a preliminary step towards the development of adaptive, compliant, and autonomous robotic systems for future on-orbit servicing and active debris removal missions.
References
Bonnal, C., Ruault, J.-M., & Desjean, M.-C. (2013). Active debris removal: Recent progress and current trends. Acta Astronautica, 85, 51–60.
Ledkov, A., & Aslanov, V. (2022). Review of contact and contactless active space debris removal approaches. Progress in Aerospace Sciences, 134, 100858.
Cauligi, A., Chen, T., Suresh, S., Dille, M., Ruiz, R., Mora Vargas, A., Pavone, M., & Cutkosky, M. (2020). Design and development of a gecko-adhesive gripper for the Astrobee free-flying robot. In i-SAIRAS.
Zhang, Y., Quan, J., Li, P., Song, W., Zhang, G., Li, L., & Zhou, D. (2023). A flytrap-inspired bistable origami-based gripper for rapid active debris removal. Advanced Intelligent Systems.
Agabiti, C., Ménager, E., & Falotico, E. (2023). Whole-arm grasping strategy for soft arms to capture space debris. In IEEE RoboSoft 2023.