Memetic Co-design of 2D Locomotion Patterns
The use of soft robots in future applications, including space exploration, motivates the search for body designs and locomotion strategies that are well suited to specific environments. Depending on gravity, terrain, and task requirements, the best morphology and gait for such robots will vary substantially. Especially in soft robots, morphology and control are deeply intertwined, and cannot be treated as two separate stand-alone challenges. In this project, we simultaneously evolve morphology and optimise locomotion for simulated 2D soft robots, combining evolutionary search with gradient-based control optimisation in a memetic framework.
Generative Encoding
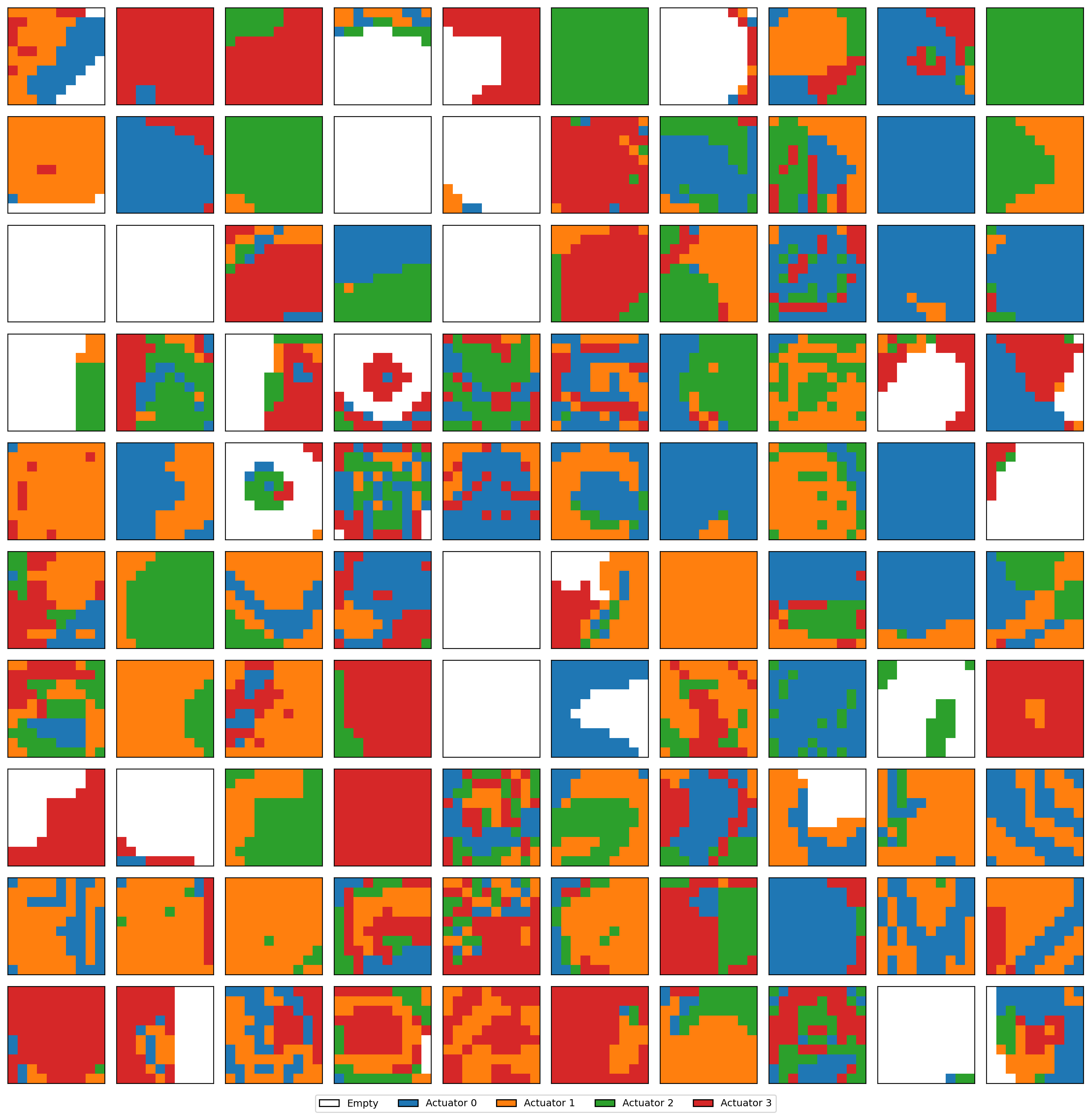
Building on previous work on genetic algorithms for co-design of soft robots for planetary exploration [1], We use Compositional Pattern-Producing Networks (CPPNs), evolved via the NEAT algorithm [2], as a generative encoding to produce robot morphologies. CPPNs are artificial neural networks with an extended set of activation functions, including repetitive, symmetrical, and linear functions, that are queried for every coordinate of a discretised grid to define both the shape and the distribution of materials. This indirect encoding naturally produces morphologies exhibiting spatial regularity, symmetry, and smooth gradients, much like the developmental processes that shape biological organisms, and allows us to arbitrarily define robot morphology whislt keeping the design not only bio-inspired, but also easier to me potentially manufactured.
Differentiable Physics Simulation
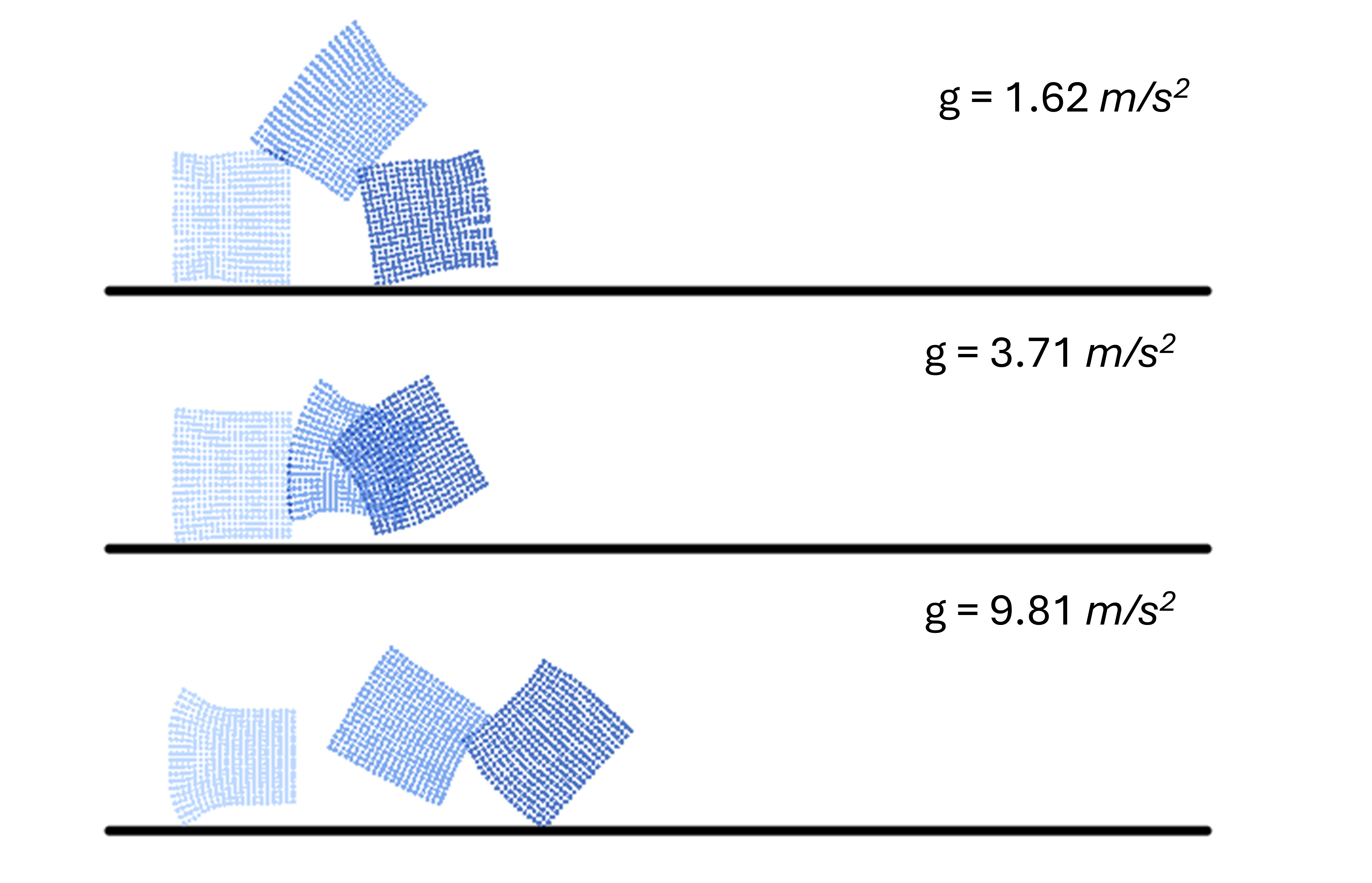
Each candidate morphology is evaluated in a differentiable 2D Material Point Method (MPM) simulation, implemented in Taichi [3]. The robot is modelled as a collection of neo-Hookean elastic particles on a background Eulerian grid. Designated groups of particles receive periodic actuation signals, internal stresses that expand and contract the material, and the resulting interaction with ground friction produces forward motion. Because the entire simulation is differentiable, gradients of the locomotion performance with respect to the actuation parameters can be computed analytically, enabling efficient control optimisation without the need for finite differences or reinforcement learning.
Memetic Optimisation
The co-design loop operates at two levels. An evolutionary outer loop explores the space of possible body plans through CPPN mutation and crossover, while a gradient-based inner loop tunes the actuation parameters, waveform amplitudes, frequencies, and biases, for each candidate design by backpropagating through the physics. This ensures that every morphology is evaluated with its best achievable gait, rather than a random or hand-designed one. Fitness is measured as the horizontal displacement of the robot's centre of mass over a fixed simulation window.
References
- Methenitis, G.; Hennes, D.; Izzo, D.; Visser, A.: Novelty Search for Soft Robotic Space Exploration. In: Proceedings of the Genetic and Evolutionary Computation Conference 2015 (GECCO 2015), 2015.
- Stanley, K. O.; Miikkulainen, R.: Evolving Neural Networks Through Augmenting Topologies. In: Evolutionary Computation, Vol. 10 (2002), Iss. 2, pp. 99–127. https://nn.cs.utexas.edu/?stanley:ec02
- Hu, Y.; Anderson, L.; Li, T.-M.; Sun, Q.; Carr, N.; Ragan-Kelley, J.; Durand, F.: DiffTaichi: Differentiable Programming for Physical Simulation. In: Proceedings of the International Conference on Learning Representations (ICLR), 2020. https://openreview.net/forum?id=B1eB5xSFvr