Agency
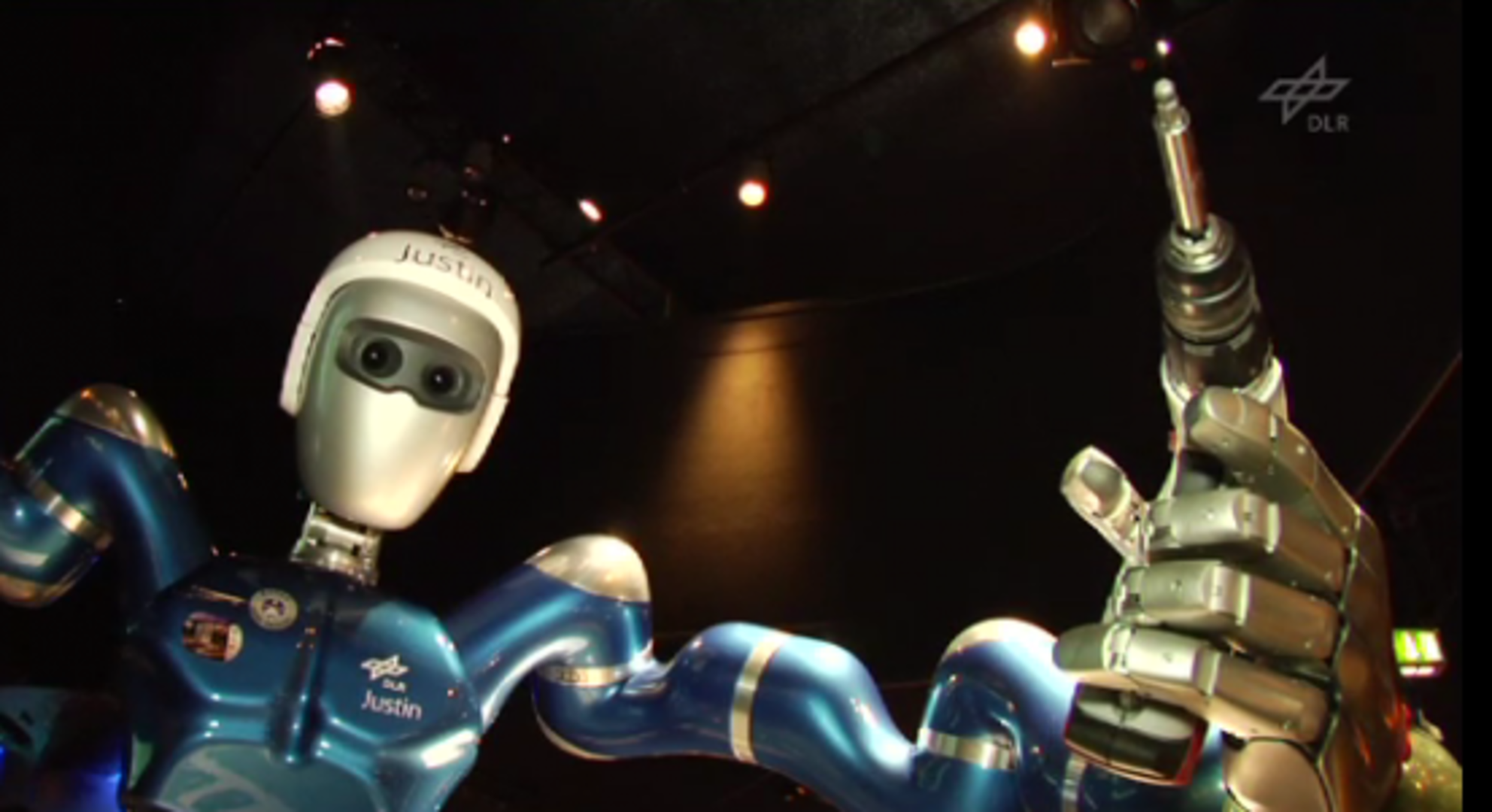
'Justin' robot from DLR
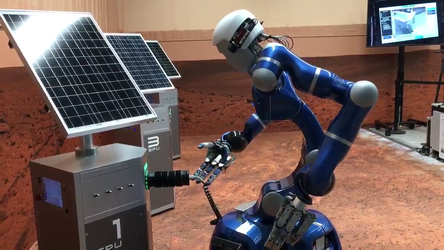
The Justin mobile robotic system, developed at the German Aerospace
Center, DLR, with its compliant controlled lightweight arms and its two
four-fingered hands, is an ideal experimental platform. The mobile platform allows the long-range autonomous operation of the system. The independent wheels respond to the requirements of Justin's upper body during manipulation tasks. Sensors and cameras allow the 3D reconstruction of the robot's environment, enabling Justin to perform his work autonomously.