Meet the teams: PoliTethers team
The PoliTethers team is composed of three Ph.D. candidates and two M.Sc. student from the Politecnico di Milano, Department of Aerospace Science and Technologies (PoliMi-DAER), in Italy. They will investigate the dynamics and control of tethered-tugs, for space transportation and active debris removal.
![]()
The dynamics of fixed-length tethered-systems (SatLeash - Experiment)![]()
![]()
| University | Politecnico di Milano, Department of Aerospace Science and Technologies (PoliMi-DAER), Italy |
| Endorsing professor |
Michèle Lavagna Politecnico di Milano, Italy |
| ELGRA mentor |
Ann Delahaye QinetiQ Space |
| Team |
Andrea Bellanca Riccardo Benvenuto Paolo Lunghi Vincenzo Pesce Simone Flavio Rafano Carnà |

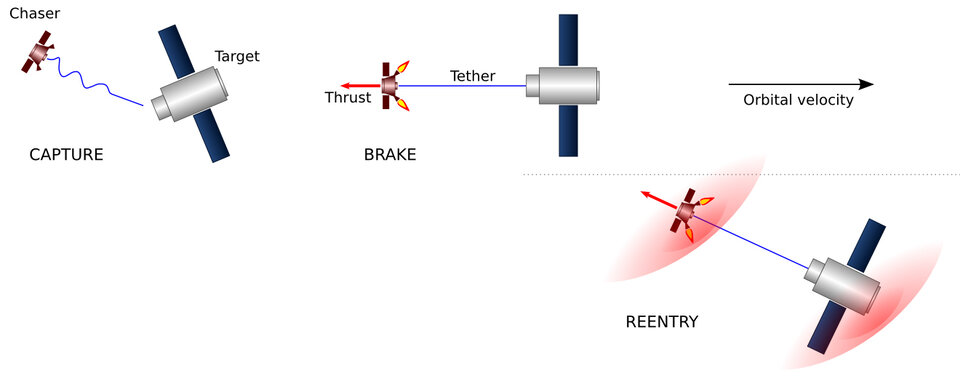
Space tethers are long cables, made of high strength fibers strands, used to connect two or more end-bodies in orbit. Many applications have been proposed for space tethers, and among them the team is focusing on Active Debris Removal and space transportation using the tethered-tug concept, i.e. two objects, one passive and one active, connected by a flexible link, the motion of the system being excited by the active spacecraft thrusters.
Because of their overall flexibility and when placed in a zero-g environment, tethered-systems undergo a complicated set of three-dimensional librations and vibrations. Therefore, it is necessary to study their three-dimensional behavior in microgravity and to this end, parabolic flights are the most suited facilities for both time-span and available test area.
Tethered system will play a crucial part in future missions. Hence, validated models, simulation tools and stabilizing control laws, describing tethered-tugs orbital and attitude dynamics, are considered of primary importance to design future missions.
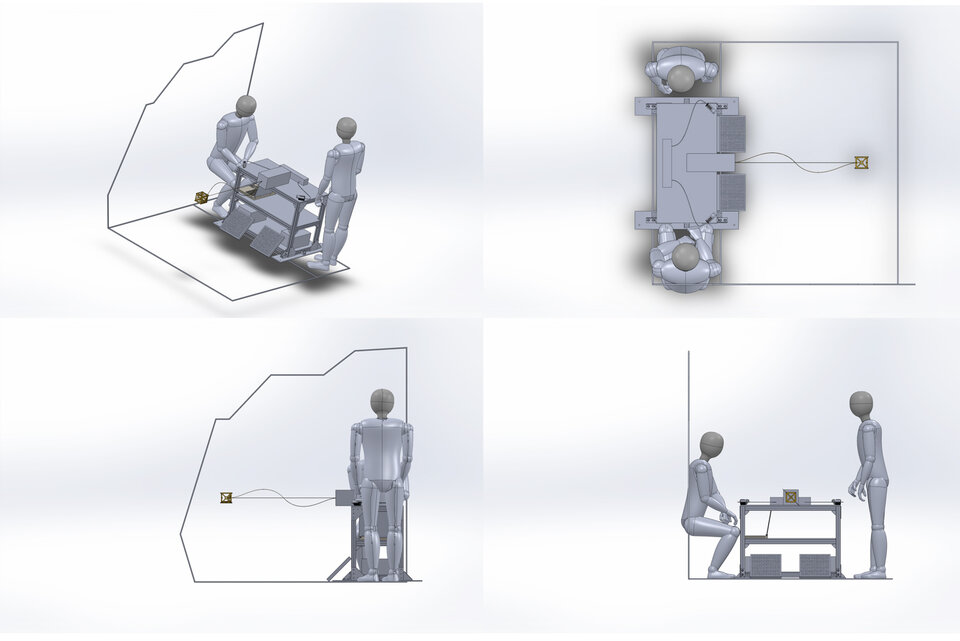
Whiplashes or bounce-back effects are an example of these highly complex dynamics. Therefore, PoliMi-DAER has developed simulation models to describe the tethered-satellite-systems dynamics and design their control. The experiment goals are the validation of these models and the implementation of control laws to stabilize the system, avoiding whiplashes or bounce-back effects. The team is proposing to fulfill these objectives by testing a reduced-scale tethered floating system, released and retrieved with different conditions. Its three-dimensional trajectory will be reconstructed using stereo-cameras and acceleration sensors. Different tether stiffness will be tested as well as different control strategies.