On Ground Validation of a Rigid Combo System (ORCO)
| Programme: | TRP ITI | Achieved TRL: | 4/5/6 |
| Reference: | 4000115461 | Closure: | 2017 |
| Contractor(s): | GMV (ES), CBK (PL), TSD (IT) | ||
In-orbit servicing, assembly and debris removal scenarios require from the coupling and combined operation of different critical technologies, mainly autonomy, manipulation robotics, spacecraft GNC (Guidance, Navigation and Control) and vision-based navigation/image processing. Full combined/coupled sequence has never been performed in–orbit and has also never been tested comprehensively on ground including the major listed system elements.
Objective(s)
The main objective has been to advance/mature some of the key technologies required to perform complex robotic scenarios (cooperative & non-cooperative) needing a rigid capture mechanism such as a robotic arm, being those:
- Image processing chain for relative navigation and robotic arm operation.
- Chaser vehicle GNC for approach and for close proximity operations.
- Robotics control.
- Simultaneous operation of two control system i.e. spacecraft GNC and robotic arm.
- Combo system overall modelling/dynamic characterization, requiring multi-body models.
Achievements and status
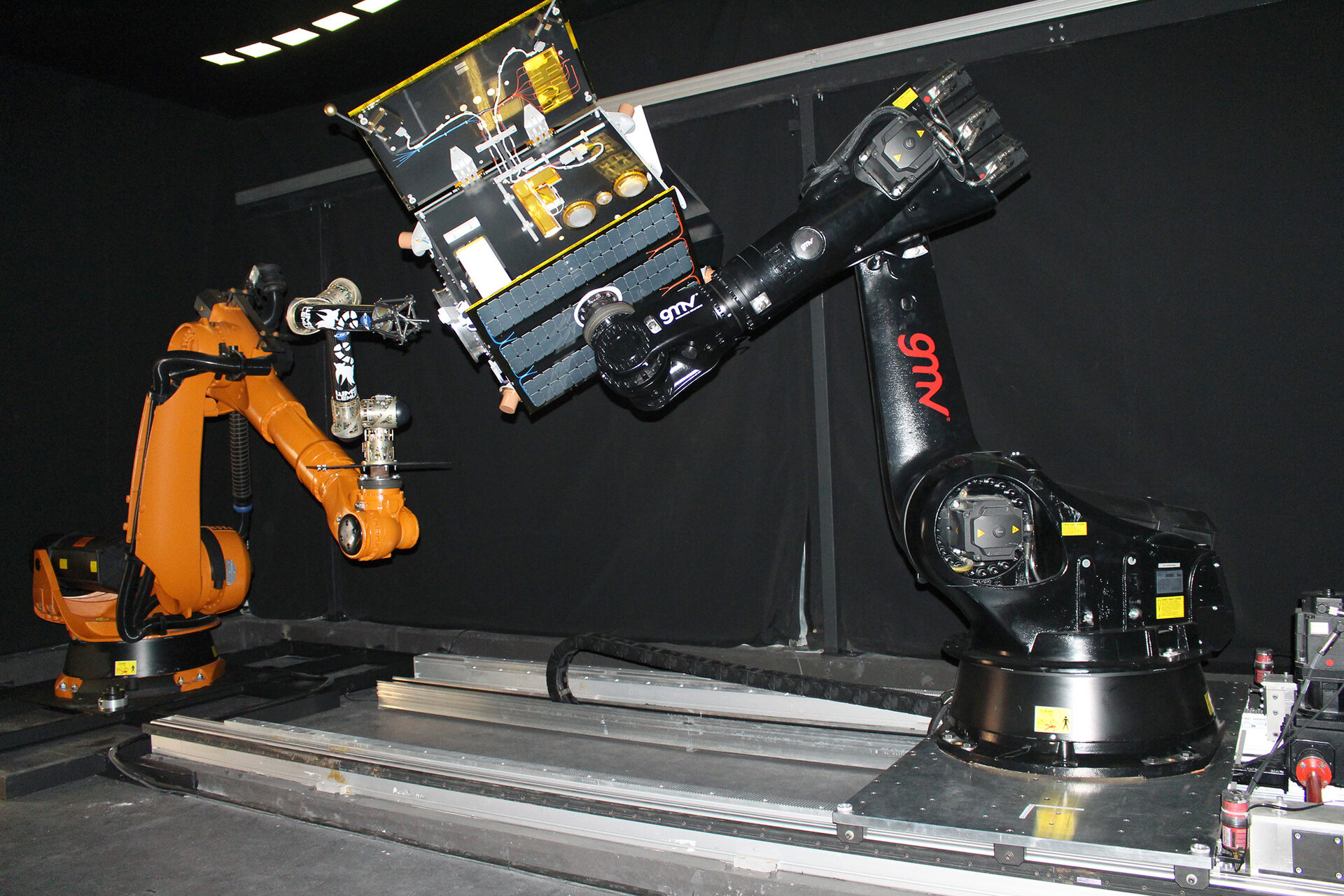
The maturation of the above mentioned technologies has included new algorithms/technologies assessment and implementation and existing solutions evolution and maturation, till achieving HW-in-the-loop end-to-end demonstration for all of them. The prototyped/integrated system (including robotic manipulator, platform GNC SW embedded in space-representative avionics, and vision-based HW/SW navigation system) has been tested in the most realistic conditions obtainable on ground, including real dynamics effects and realistic air-to-air sensors/actuators stimulation/operation. The on-ground validation and integration has been performed taking advantage of the GMV’s platform-art© dynamic test facility located in Madrid, Spain, with the addition of the hardware provided by the team partners: robotic manipulator system from CBK (Poland) and visual opto-electronic system from TSD (Italy). The major achievements include:
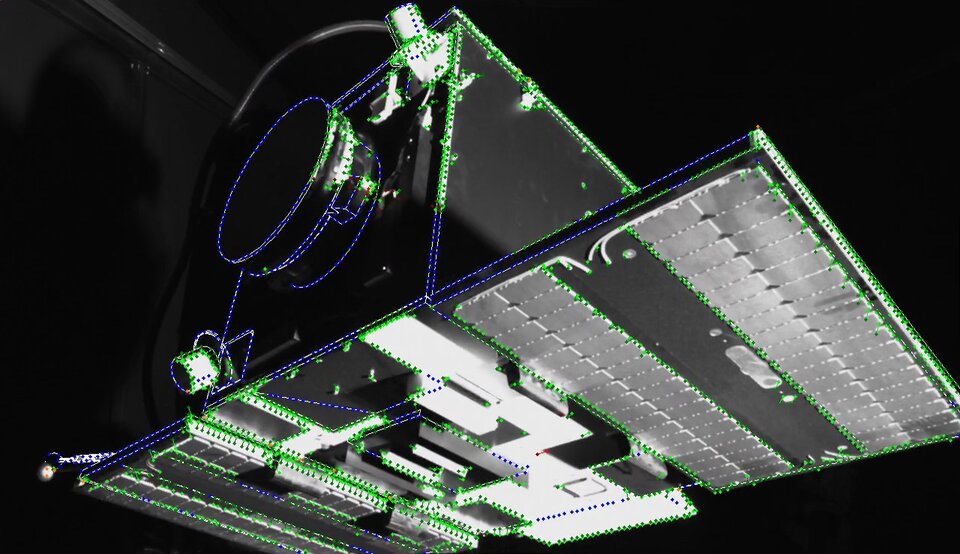
- TRL 5/6 for the vision-based system, including HW (space-heritage optical and processing units have been used) and SW (performant Image Processing algorithms has been coded in VHDL and embedded in the camera processing units, working at 2Hz)
- TLR 4/5 for the full system (TRL 4/5 at functional level, TRL4 at interfacing level)
Benefits
Ultimately, the consortium has achieved a comprehensive ground testing of all abovementioned critical technologies for debris removal missions, contributing to the technologies maturation. Particularly relevant are:
- Availability of HIL dynamic based laboratory ready to host/test evolved/new debris removal solutions quickly and efficiently.
- Availability of a vision-based system ready to be validated in space as unique on-board sensing system to provide relative pose.
Next steps
The envisaged next steps include:
- Further maturation and re-use of ORCO results and breadboards for current/future ESA and EU programs, including on-going ESA TRP activities and on-going EU H2020 PERASPERA program.
Look for flight opportunities to fully qualify in space (achieving TRL8) the HW/SW vision-based navigation system for relative pose estimation.