

Planet and Asteroid Natural Scene Generation Utility (PANGU) Tool Enhancement
| Programme: | TRP Workplan | Achieved TRL: | 5 |
| Reference: | T305-001EC | Closure: | 2017 |
| Contractor(s): | University of Dundee (GB) | ||
Planetary landers and rovers which use vision-based navigation systems have to be verified and validated before launch. It is very difficult to do this with a physical mock-up, particularly for lander navigation applications, and high fidelity, real-time simulation is necessary. PANGU-4 is a software simulation tool that models planet surfaces and provides photo realistic images at high frame rates.
Objectives
The main objective of the version PANGU-4 is to ensure that the software is ready to support future ESA planetary lander missions as well as enhance the capabilities and performance of PANGU, with improved realism and real time capabilities.
Achievements and status
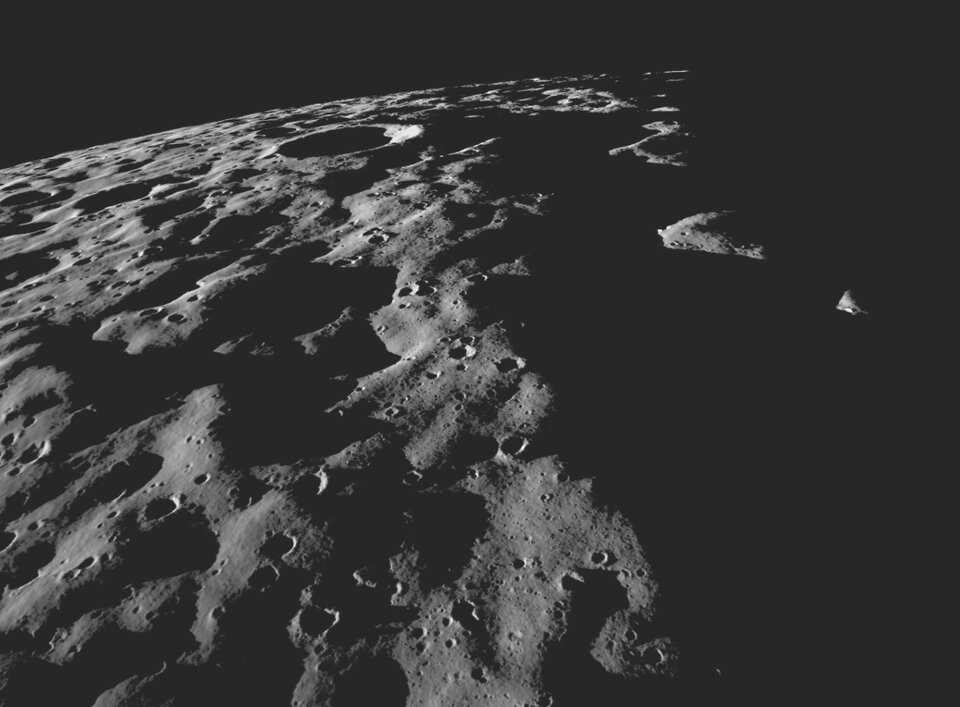
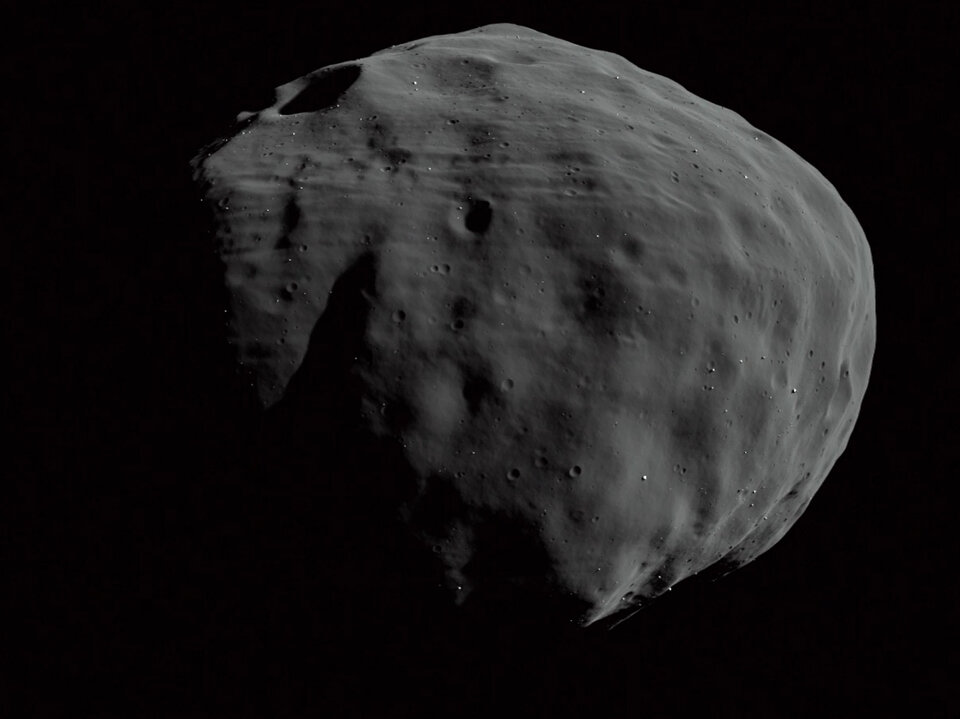
Extensive improvements have been made to PANGU’s surface modelling features, achievable model size, model complexity and surface resolution, enabling simulations that start from orbit and end on the surface. Whole planet and small-body importing, modelling and enhancement capabilities have been added. The quality of the rendering has been improved to photo-realistic level and the performance has been improved to enable real-time hardware-in-the-loop simulation, which is important for the latter stages of navigation equipment validation. A powerful camera model has been developed to allow the characteristics of real cameras, including radiation effects, to be included in the simulation. PANGU-4 is able to operate with the NAIF/SPICE system to support accurate simulations of real world historical events and easy integration with other simulation systems. PANGU-4 has been extensively verified and validated at unit and integration level. A series of absolute validation tests have also been carried out to compare the simulated images against real planet and asteroid images and against images taken with real cameras using physical elevation and shape models.

Benefits
The PANGU-4 tool is capable of supporting the design of lander and rover vision-based navigation systems through all stages of development, from conceptual studies of image processing techniques, camera selection studies and performance assessment, to hardware integration and testing support.
Next steps
PANGU-4 is an important tool for planetary lander and rover navigation support activities and missions. It complements testing with physical models. Several further improvements and enhancements to PANGU are planned under GSTP funding in-line with ESA’s requirements for missions currently being planned or studied.

