
Astronauta ESA va sott'acqua per testare il braccio robotico europeo
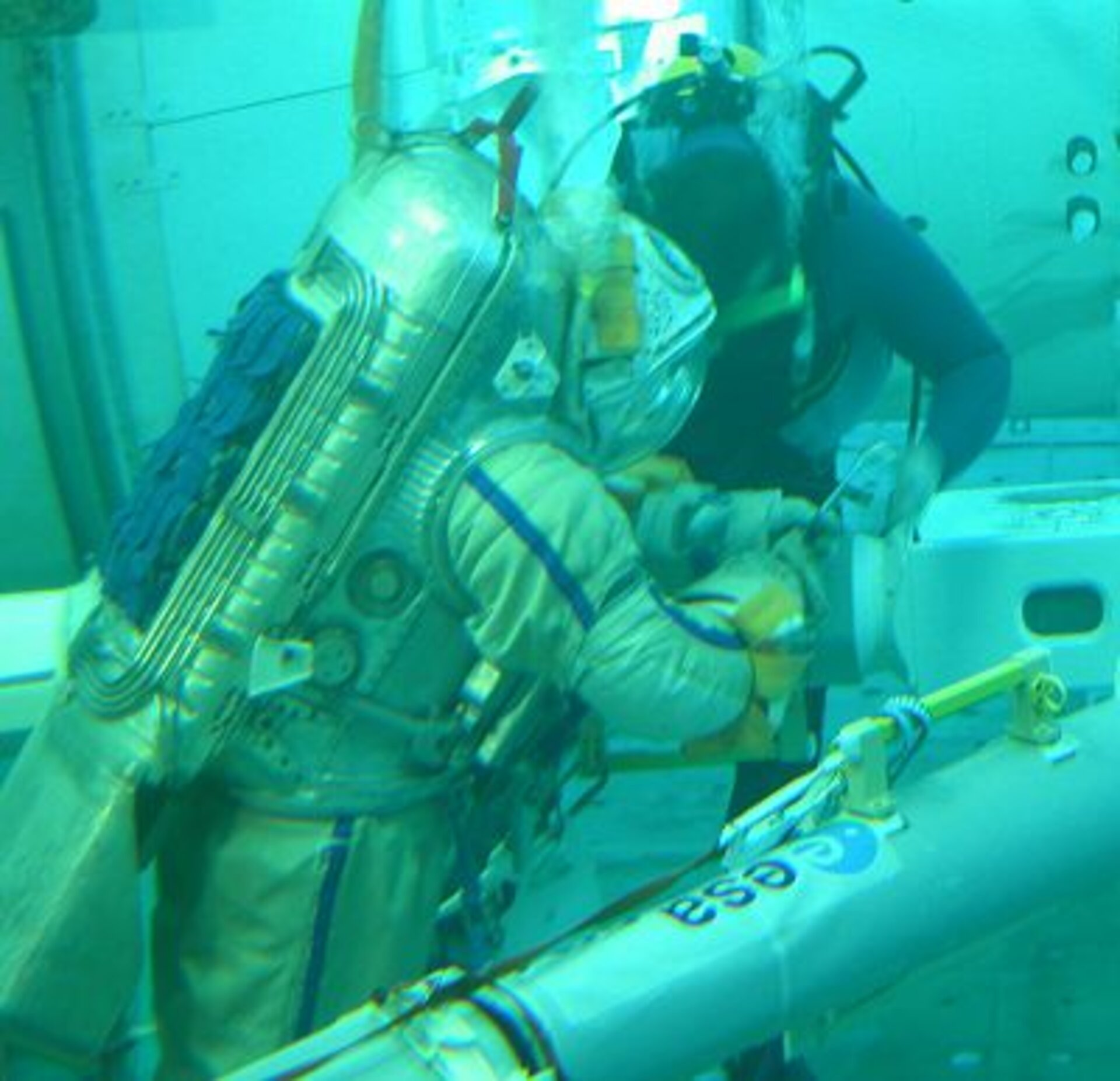
La scorsa settimana, presso il Gagarin Cosmonaut Training Centre nei pressi di Mosca, è stato ispezionato e testato il modello WET del braccio robotico europeo (ERA, European Robotic Arm). L'astronauta dell'ESA André Kuipers ha indossato per l'occasione una tuta russa Orlan.
Imponente
L'astronauta ha trascorso più di tre ore in immersione con il modello del braccio robotico, costruito nel 1998, ma ancora in perfette condizioni.
L'imponente braccio robotico è lungo più di undici metri e pesa 630 kg. Quando ERA raggiungerà la Stazione Spaziale Internazionale (ISS), la sua nuova base operativa sarà il modulo laboratorio multifunzionale (MLM) russo. Grazie a sette articolazioni, una varietà di strumenti e un'elettronica avanzata, questo dispositivo di ausilio per gli astronauti potrà muoversi come un insetto tra i segmenti russi dell'ISS e verrà utilizzato per diverse attività.

Philippe Schoonejans, a capo del progetto ERA dell'ESA ha affermato: "Il braccio robotico europeo può lavorare con la camera d'equilibrio russa e questo significa che gli astronauti non dovranno più avventurarsi all'esterno della Stazione Spaziale per installare determinate apparecchiature. Con l'aiuto di videocamere, il braccio può ispezionare l'esterno della Stazione, spostare esperimenti e rifornimenti e servire persino da gru per gli astronauti".
Kuipers ha testato il modello sperimentale per ambiente in assenza di gravità, conosciuto come modello 'WET' (Weightless Environmental Test). Questo modello è stato costruito nel 1998 da un consorzio di aziende guidate dall'olandese Dutch Space. Originariamente, ERA avrebbe dovuto essere lanciato con lo Space Shuttle nel 2001, ma per una serie di circostanze il suo viaggio di trasferimento è stato ritardato. L'estate scorsa è stato infine deciso di inviare il braccio robotico nello spazio nel novembre 2007, a bordo del razzo russo Proton assieme al modulo MLM.
Un duro lavoro

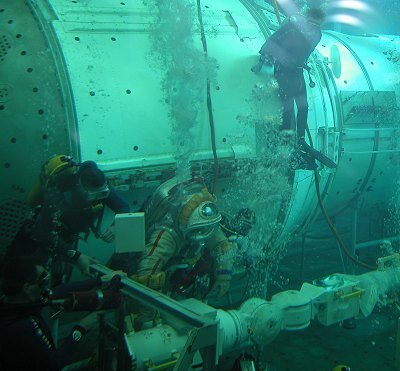
Prima di allora resta tuttavia ancora del lavoro da fare. La settimana scorsa, in un'esercitazione sott'acqua guidata da Kuipers, il modello WET è stato smontato e quindi riassemblato. Assieme al russo Dmitry Verba, Kuipers ha controllato anche i comandi manuali, utilizzati come riserva in caso di malfunzionamento del sistema automatizzato. "L'esercitazione è stata dura. Ci è voluta molta pazienza", ha detto l'astronauta olandese. "Abbiamo dovuto fare molti movimenti rotatori per testare il comando manuale del braccio. Cosa assolutamente non semplice sott'acqua".
Il braccio ha funzionato bene, ma secondo Schoonejans occorre apportare ancora qualche miglioramento. Alcune operazioni che avrebbero dovuto essere compiute con una mano sono state eseguite da Kuipers con due mani o con l'aiuto di Verba, poiché l'astronauta non aveva la possibilità di raggiungere un assetto stabile. Per risolvere questo problema, la soluzione potrebbe essere l'introduzione di un meccanismo di aggancio mobile. Sarà necessario anche modificare una serie di chiavi che continuano ad allentarsi in fase di serraggio dei bulloni, facendo perdere tempo prezioso. Il materiale isolante, che a volte ha ostruito le videocamere, sarà anch'esso fissato in modo più sicuro.
La perfezione
Nel corso del prossimo anno, la società russa Energia e i partner europei che hanno costruito ERA lavoreranno per perfezionare il braccio robotico. A partire dalla metà del 2006, al completamento delle nuove procedure, i futuri equipaggi della Stazione Spaziale Internazionale si eserciteranno per la prima volta con ERA. Entro il lancio previsto per la fine del 2007 arriveranno sicuramente a conoscerne tutti i segreti.

