
Astronauta de la ESA prueba el Brazo Robótico Europeo bajo el agua
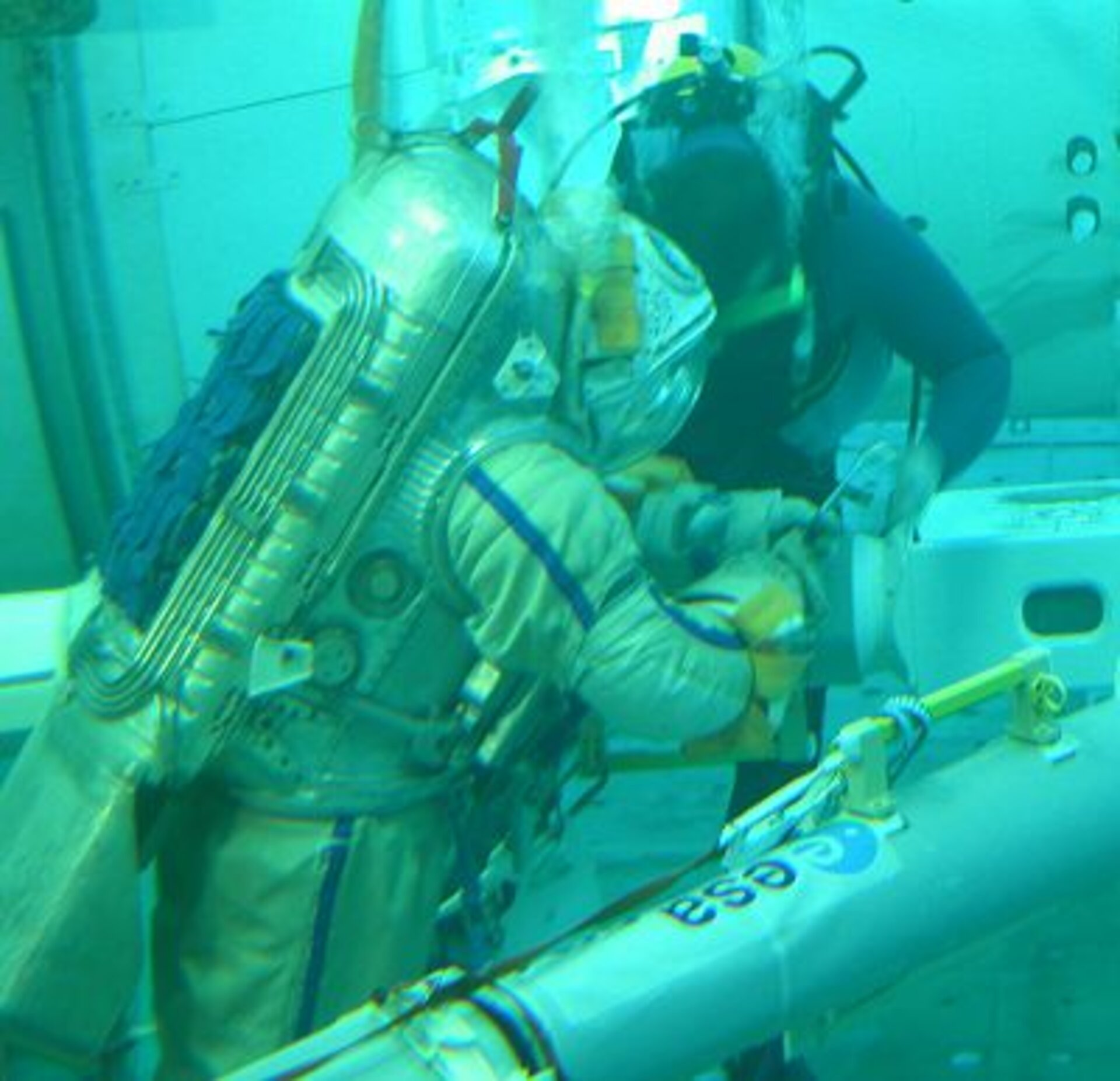
El modelo de Prueba Ambiental de Ingravidez (WET) del Brazo Robótico Europeo (ERA) fue sometido a minuciosas inspecciones y pruebas en el Centro Gagarin de Entrenamiento de Cosmonautas cerca de Moscú la semana pasada. André Kuipers, un astronauta de la ESA, vistió un traje espacial ruso Orlan en esa ocasión y pasó más de tres horas bajo el agua con el modelo del brazo robótico que fue construido en 1998 pero sigue estando en perfectas condiciones.
Impresionante
El impresionante brazo robótico tiene más de 11 metros de longitud y pesa 630 kg. Una vez que el ERA llegue a la Estación Espacial Internacional (ISS), quedará alojado en el Módulo de Laboratorio Multiuso ruso. Con la ayuda de siete articulaciones, una variedad de herramientas y sus componentes electrónicos, este mecanismo de asistencia para el astronauta puede moverse como un insecto alrededor de los segmentos rusos de la ISS y será utilizado para diversas tareas.

En palabras de Philippe Schoonejans, Director del Proyecto ERA de la ESA: “El ERA puede funcionar con la cámara hermética rusa, lo que significa que los astronautas no tendrán que aventurarse fuera de la estación espacial para instalar ciertos componentes. Utilizando cámaras de vídeo, este brazo puede realizar inspecciones de la parte exterior de la estación, mover experimentos y suministros e incluso servir como grúa para los astronautas.”
Kuipers probó el modelo de Prueba Ambiental de Ingravidez del ERA, denominado “modelo WET” por sus siglas en inglés. Este modelo fue construido en 1998 por un consorcio de empresas dirigido por Dutch Space de Holanda. En un principio estaba previsto el lanzamiento del ERA en el Trasbordador Espacial Shuttle en 2001, pero su lanzamiento se ha pospuesto debido a diversas circunstancias. El verano pasado se tomó la decisión de lanzar este brazo robótico en noviembre de 2007 a bordo de un cohete Protón ruso junto con dicho Módulo de Laboratorio Multiuso.
Trabajos pesados

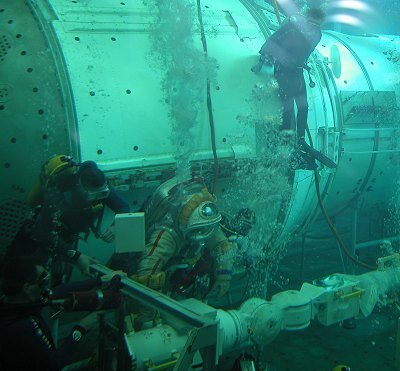
No obstante, queda mucho por hacer antes de esa fecha. La semana pasada, en un ejercicio bajo el agua dirigido por Kuipers, el modelo WET fue desarmado y vuelto a ensamblar. En compañía de Dmitry Verba, un astronauta ruso, Kuipers también revisó los controles manuales que funcionan como dispositivos de reserva para el sistema automatizado. “El ejercicio encerraba grandes dificultades y requirió mucha paciencia de nuestra parte”, afirmó el astronauta holandés. “Tuvimos que llevar a cabo muchos movimientos rotativos durante el control manual del brazo, lo cual no es una tarea fácil bajo el agua.”
El brazo funcionó bien, aunque Schoonejans llegó a la conclusión de que todavía deben realizarse ciertas mejoras. Algunas operaciones diseñadas para llevarse a cabo con una mano tuvieron que ser efectuadas por Kuipers usando sus dos manos o con la ayuda de Verba, su compañero ruso, puesto que el astronauta no tenía medios para estabilizarse por sí mismo. Una posible solución para este problema consistiría en utilizar un mecanismo de sujeción móvil. Además, será necesario modificar un conjunto de llaves ajustables que se sueltan continuamente al apretar los tornillos, desperdiciando un tiempo valioso. El material de aislamiento que en ocasiones obstruía las cámaras de vídeo también deberá sujetarse con mayor firmeza.
Perfeccionamiento
El próximo año, la empresa rusa Energía y los socios europeos que construyeron el ERA cooperarán para perfeccionar el brazo robótico. Desde mediados del 2006, una vez que se hayan preparado nuevos procedimientos, las tripulaciones de las futuras expediciones a la ISS se entrenarán con el ERA por primera vez. De esta manera se habrán familiarizado totalmente con el ERA antes de su lanzamiento en 2007.

