
Rover e astronauta di lungo corso conquistano l'Etna
In una complessa versione simulata di una missione sulla Luna, i controllori dell'ESOC hanno collaborato con un team di geologi e con l'astronauta dell'ESA Thomas Reiter per supervisionare la raccolta di campioni di roccia da parte di un rover. Comportandosi come se si trovasse sull'orbita lunare, l'astronauta stava in realtà lavorando da una camera di albergo a Catania, con il rover a 23 km di distanza e a 2.600 m di altezza sulle pendici dell'Etna. Mentre Thomas ordinava al rover di raccogliere le rocce, la sua mano sperimentava proprio quello che percepiva la pinza del robot, offrendo un'ulteriore dimensione al controllo a distanza.
Questa parte conclusiva del progetto "Analog-1" si è svolta nell'ambito di una più ampia campagna multi-agenzia e multi-rover organizzata dal Centro aerospaziale tedesco DLR. Il progetto ARCHES (Autonomous Robotic Networks to Help Modern Societies), ha analizzato la capacità dei robot autonomi di collaborare e condividere dati in rete.
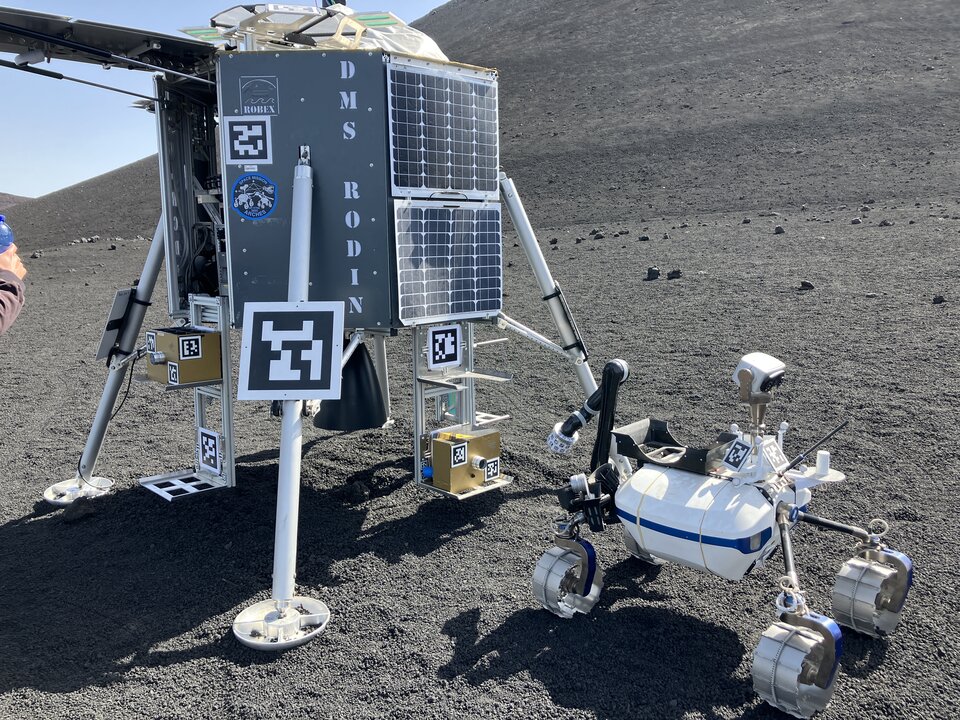
Il rover Interact dell'ESA, a quattro ruote e due bracci, è stato costruito dallo Human Robot Interaction Lab dell'Agenzia e adattato ai pendii rugosi del vulcano. Questo robot fa parte di una squadra composta da due rover DLR (Lightweight Rover Unit 1 e 2) insieme a un lander "lunare" fisso che fornisce Wi-Fi e energia ai rover, oltre a un drone per la mappatura della superficie. L'Istituto di Tecnologia di Karlsruhe ha contribuito con il cingolato Scout, simile a un millepiedi, ottimizzato per i terreni difficili, che potrebbe anche fungere da relè tra Interact e il lander, incrementandone l'area operativa.

La consegna delle rocce al lander da parte del rover ha segnato la conclusione di una missione di quattro giorni in cui un rover ha simulato un allunaggio per raccogliere campioni, guidato da un centro operativo del rover e da un laboratorio scientifico sulla Terra, e da un astronauta a bordo del Gateway lunare. Le operazioni del rover sono state coordinate dall'ESOC in Germania, mentre l'astronauta e gli scienziati sono rimasti in stanze separate in un hotel vicino.
"Una missione simulata come questa è essenzialmente un gioco di ruolo in cui è molto importante che i giocatori si immergano completamente nello scenario", spiega Kjetil Wormnes, Responsabile di Progetto di Analog-1.
"In questo caso, gli operatori del rover all'ESOC, così come gli scienziati del laboratorio scientifico e, naturalmente, l'astronauta a bordo del nostro Gateway lunare analogico, tutti dovevano sentirsi come fossero sulla Luna. L'Etna è stato scelto proprio per la sua eccellente geologia di tipo lunare, che consente un'esperienza di immersione adeguatamente completa, mentre l'astronauta e gli scienziati sono stati tenuti separati in un hotel della vicina Catania".
Per ottenere il massimo realismo, al sistema di controllo del rover è stato aggiunto un secondo di ritardo nel segnale, equivalente al tempo che i comandi impiegherebbero per viaggiare tra il Gateway e la superficie lunare. Il metodo di controllo con ritorno di forza è stato progettato per funzionare con tali ritardi.
Kjetil aggiunge: "L'allestimento è stato impegnativo, ma i sistemi hanno funzionato molto bene e abbiamo imparato molte cose sul funzionamento di un rover sulla Luna che potranno aiutarci quando in futuro lo faremo davvero. Siamo molto contenti perché c'è voluto molto lavoro per arrivare fino a questo punto, e i test sull'Etna hanno subito ripetuti rinvii a causa del COVID-19".
Thomas Reiter commenta: "Abbiamo imparato molto sulla collaborazione tra il controllo a terra sulla Terra e l'equipaggio a bordo di una stazione spaziale in orbita attorno alla Luna, entrambi impegnati nella gestione di un rover sulla superficie: questa operazione "condivisa" può risultare estremamente efficiente, molto più di quanto non lo sarebbe se una delle due parti facesse tutto da sola".

Thomas Krueger, a capo dello Human Robot Interaction Lab dell'ESA, afferma: "Gli ottimi risultati ottenuti sono entusiasmanti, perché ci consentono di considerare il metodo di controllo a ritorno di forza già collaudato e pronto per essere utilizzato dai nostri partner internazionali nella pianificazione delle future esplorazioni lunari".
"La strada per arrivare a questi risultati è stata lunga: il nostro team ha iniziato a lavorare sul concetto più di dieci anni fa, incrementando progressivamente la complessità. Abbiamo iniziato con un semplice joystick che poteva essere controllato a distanza da un astronauta in orbita, studiando la percezione del ritorno di forza in assenza di peso, poi il nostro laboratorio ha sviluppato il rover Interact espressamente per essere gestito dallo spazio. Successivamente siamo passati alla prima campagna di test completa dell'Analog-1, condotta da Luca Parmitano dalla Stazione Spaziale Internazionale in un finto paesaggio lunare all'interno di un hangar olandese.
L'unico test rimasto in sospeso era quello di dimostrare che il sistema fosse in grado di affrontare l'imprevedibilità intrinseca di un ambiente naturale all'aperto, obiettivo che è stato raggiunto con l'ultima campagna sull'Etna. Thomas ha dovuto affrontare pendii scoscesi, le ruote del rover sono rimaste intrappolate nella sabbia, ma è riuscito comunque a recuperare i campioni e a riportarli al lander in attesa.
Thomas Krueger aggiunge: "Il rover è estremamente evoluto. Ben presto ci siamo resi conto che la sorveglianza continua a distanza era molto impegnativa per l'operatore astronauta, quindi abbiamo aggiunto funzionalità per alleggerire un po' il carico di lavoro - analogamente alla guida assistita offerta dalle auto moderne. Ad esempio, l'operatore può indicare un luogo e lasciare che il rover decida in autonomia come raggiungerlo in modo sicuro. La sua rete neurale è stata programmata per riconoscere autonomamente le rocce che hanno un valore scientifico.

"In questo modo, l'operatore è libero di concentrarsi sulle attività prioritarie che gli esseri umani sono in grado di gestire al meglio. Si è rivelato un terreno difficile per i veicoli gommati, quindi è stato un enorme sollievo vedere come tutto si sia svolto senza intoppi".
Nell'ultimo giorno di test, i rover hanno collaborato per posizionare una serie di antenne 'LOFAR' in punti ottimali della 'superficie lunare' per effettuare attività di radioastronomia.

Queste antenne sono di fatto modelli funzionanti e gli astronomi hanno trascorso una notte sul vulcano per effettuare un sondaggio radio del cielo, riuscendo a captare un burst radio proveniente da Giove, causato dal passaggio di Io, la sua luna vulcanica, attraverso il suo campo magnetico.
"Sono sicuro che nella seconda metà di questo decennio saremo perfettamente preparati a svolgere esattamente questo tipo di attività condivise tra la terra e la stazione spaziale, controllando un rover sulla superficie della Luna", conclude Thomas Reiter.

"A proposito, arriverà il momento in cui anche gli astronauti e le astronaute europei lasceranno le loro impronte sulla superficie della Luna! E anche in uno scenario del genere, il funzionamento condiviso dei sistemi robotici e dell'equipaggio in superficie sarà estremamente efficiente".