Joint ESA/Russian team in Moscow ready to support Jules Verne
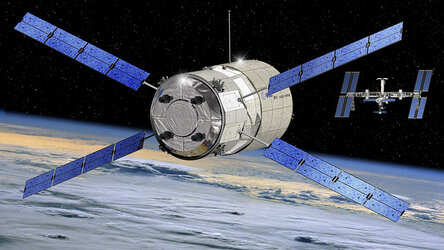
When the Jules Verne Automated Transfer Vehicle (ATV) is launched in early March it will use several key spacecraft hardware items such as the docking and refuelling systems, and the Kurs radar, procured in Russia. European and Russian engineers have worked together to adapt them from their previous use on the Russian spacecraft Progress and Soyuz to the much larger 20-tonne ATV vessel.
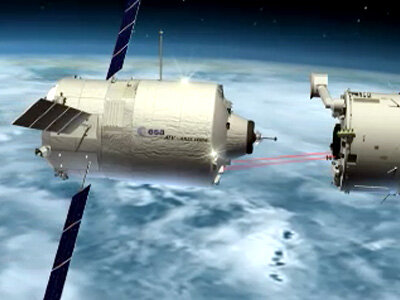
Several weeks after launch from Europe's Spaceport in Kourou, French Guiana, Jules Verne will reach the International Space Station (ISS) orbiting about 400 km above our heads, and rendezvous and dock with the Russian segment of the ISS. Jules Verne and the Russian Service Module will then form an integrated European/Russian complex that will have to function as one vehicle for up to 6 months. The ATV and the Russian Service Module will not only support together critical functions such as refuelling in orbit and re-boosting the ISS, but they will also share numerous interfacing systems like power, data handling, thermal and life support systems.
Obviously this requires close links between European and Russian engineering communities, throughout the entire Jules Verne mission. To meet this need, in 2004 ESA set up a small Engineering Support Team (EST-MO) co-located at Moscow Control Centre. The main function of this group, varying from 8 to 15 people, is to monitor the behaviour of Jules Verne in relation to its Russian components or Russian interfaces, and to interact with the local ISS Russian engineering representatives on any matters requiring direct technical exchanges. This support group also has to work in close coordination with the main ATV Engineering Support Team based at the ATV Control Centre in Toulouse (ATV-CC).
Experts to monitor Jules Verne’s flight
At the ATV-CC, next to the Flight Control Team in charge of the ATV operations, sits the main Engineering Support Team which includes experts from ESA and prime contractor EADS-Astrium, constantly monitoring the data and daily operations planning, and ready to support the flight controllers if anything unexpected happens with the ATV systems. Since they know all the hardware and systems, they are able to propose quick corrective measures in case of an anomaly or failure.
The official language during ATV operations is English, including communications with Moscow and Houston, but the EST-MO group can also switch to Russian when both parties are Russian. EST-MO experts do not speak directly to flight controllers nor send commands to the ATV.
This complex setup, about to be put to the test for the first time with Jules Verne, has of course required a thorough training programme. Since July 2007, the EST-MO team members, from both ESA and RSC-Energia, have participated in a series of Joint Integrated Simulations (JIS), involving all three main Control Centres in Toulouse, Moscow and Houston.
The JIS programme has covered both nominal and off-nominal mission scenarios. “One example of what the future EST-MO role could be was when the ‘trainer’ suddenly ordered a failure scenario with the interruption of the docking system probe retraction, shortly after the ATV was captured by the ISS. At the same time, an unexpected simulator behaviour added further complexity to this training session. This was eventually resolved because the ATV docking system experts were able to establish a direct technical exchange with their ISS counterparts sitting in the next room”, said Massimo Cislaghi, ESA's EST-MO Leader.

Although the main EST-MO working location has been and will be the ESA Moscow Support Room (EMSR) located inside the Moscow premises, some of the EST-MO training has taken place directly at ATV-CC in Toulouse, in order to allow the team to get acquainted with that working environment and with their colleagues based there. During actual flight operations they will coordinate mainly through voice exchanges.
At the end of the EST-MO training programme all ESA and RSC-Energia Russian Systems specialists are ready to face the various situations practised in the training exercises. “At the same time, their wide experience and know-how accumulated through dozens of Russian vehicle rendezvous, docking and attached operations, represent a guarantee of their ability to face unforeseen events that can never be excluded for such a challenging programme,” added Cislaghi.
During the Jules Verne mission, the ATV will perform automated manoeuvres which are closely monitored by almost 60 controllers in Toulouse, Houston and Moscow. For the first time in history, three space centres will interact from different sides of the world.