Lab instrumentation
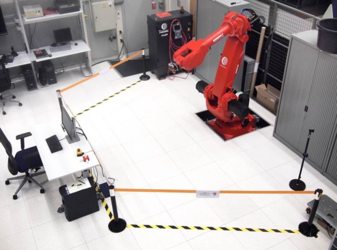
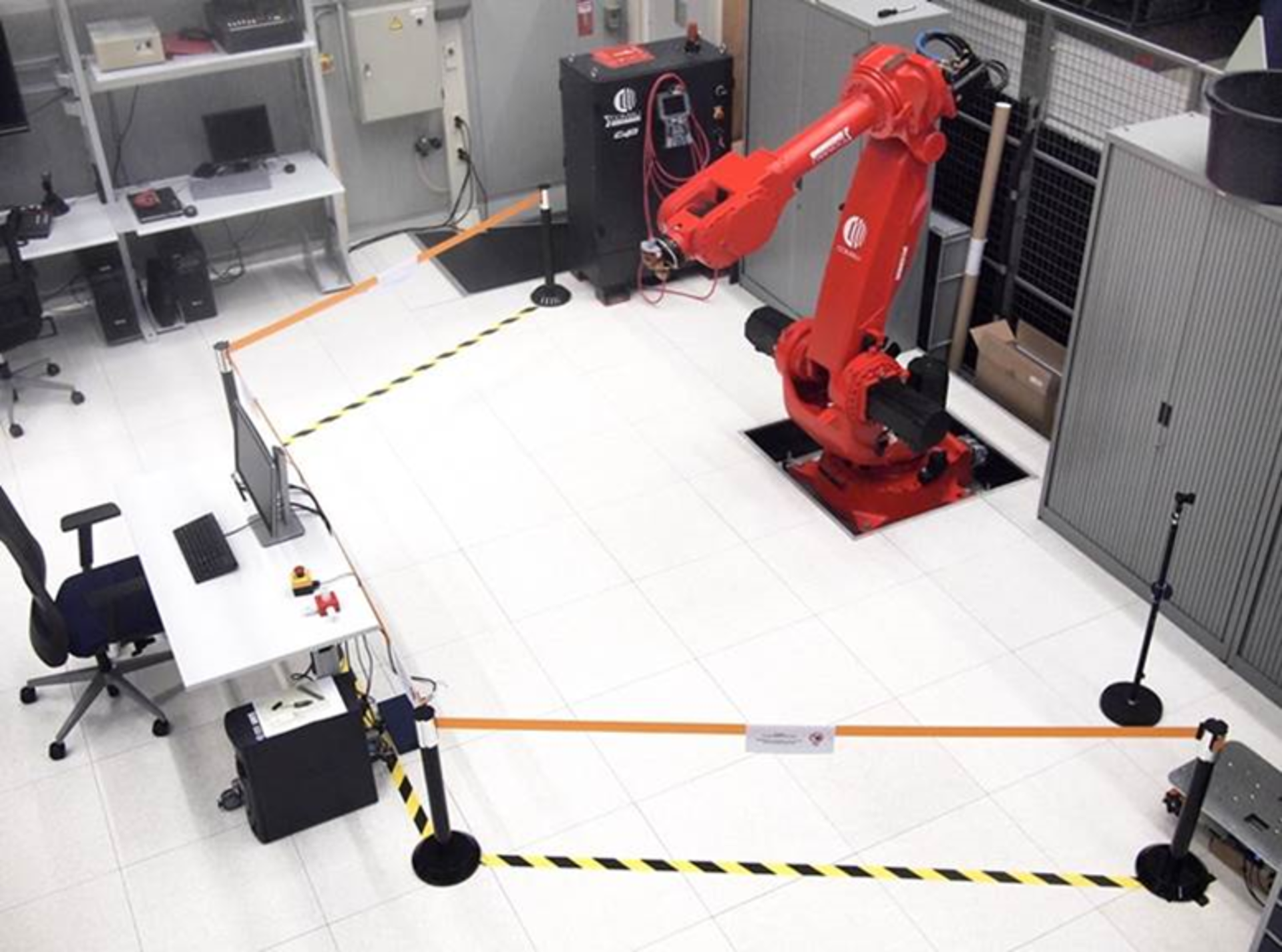
COMAU NJ130 Industrial Robot
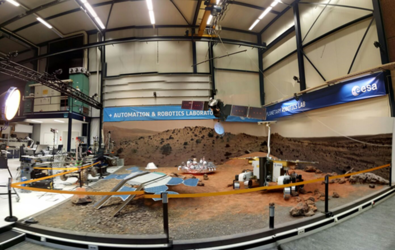
The COMAU robot arm has been setup and used in the scope of the GNC Robotics Testbed activity with the main goal of combining the elements of the GNC laboratory with the robotics facility and use the resulting test bed to integrate GNC scenarios that simulate the EDL or Rendezvous trajectory of a spacecraft.
RiEGL LMS-Z210i – Laser Scanner
The scanner allows to generate dense 3D scans. It is mostly used to generate scans of terrains as ground truth.
Nikon K600 – Optical Robot Calibration System

Optical Measurement and Calibration System that computes very accurate 3D calibration data (e.g., sensor frames). It is avery precise and expensive system that has ben lent to industry few times.
Trimble Differential GNSS Base Station
GNSS base station providing WiFi-connected GNSS receivers with RTK corrections that allow accurate positioning outdoor.
SenseFly eBee – 3D Mapping and Surveying Drone

Autonomous fix-wing drone and related control/processing software capable of producing maps (ortomosaic, DEM) of areas up to 2cm/pixel accuracy.