Research topics
Bilateral Telemanipulation
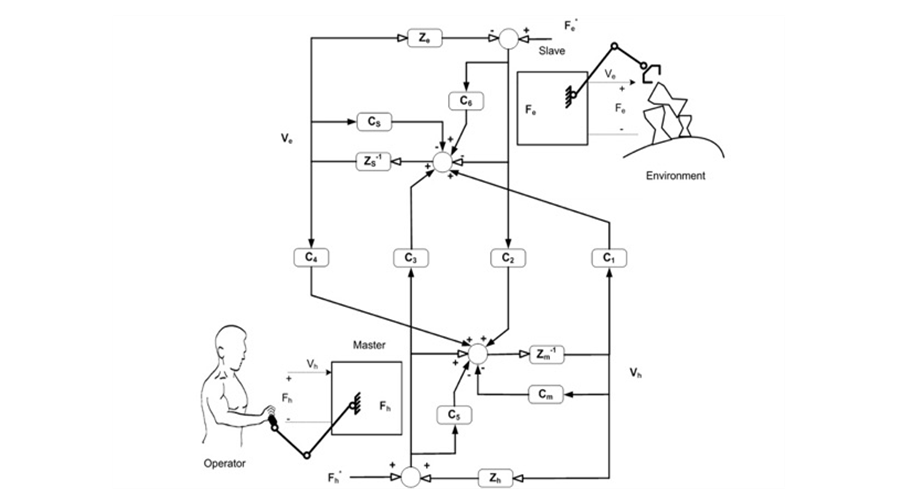
Bilateral control denotes the field of master-slave robot control with force reflection. We perform research in the domains of classical bilateral control, in time-delayed bilateral control and in bilateral control for extreme time delay. In the most classical approach, modeling techniques are researched that allow the optimisation of control parameters, e.g. in a 4-channel architecture. For time-delayed teleoperation, non-linear control techniques such as passivity-observers and passivity-controllers are used, to stabilise the telerobotic system up to approx. 350 ms of round-trip delay with acceptable loss of teleoperator transparency. For cases in which time-delay increases up to the second range, model-mediated techniques are researched. Such techniques can provide stable interaction even under extreme situations (multiple seconds) while providing good haptic feedback. This is at the expense of realism when interacting with unknown environments.
Perception Optimization

In order to maximise the benefit of 3D remote vision, a geometrically correct image needs to be provided to the human operator from the remote work-site. Camera systems as well as the display system need to be optimised for low depth distortion and scaling. This way, intuitive depth perception can contribute to good situational awareness and accurate interpretation of the situation at the remote work site. Research focuses on techniques for realistic display in a variety of environments (e.g. screens, displays, and head-mounted displays) and on the acceptance and performance analysis of human operators while performing remote operations.