The ESA Exoskeleton
The ESA Human Arm Exoskeleton has been developed to operate astronaut-like robots remotely from a safe and comfortable environment.
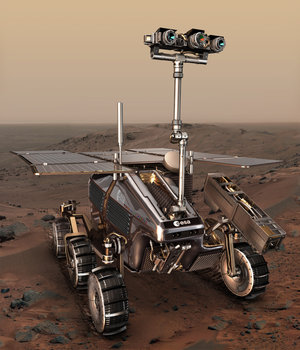
With the system the astronauts can, for instance, telemanipulate a dexterous robot arm outside the International Space Station or to work rover-assistants on the lunar or martian surfaces.
The exoskeleton is a wearable human–machine interface that allows robot operations by feeling and touching; the system creates a force feedback to sense the surface or object.

With ‘touch’ telepresence and high-quality vision, anyone can operate a robot without training.
The system has been designed to be transportable and easily wearable without any attachment to external structures during operation. It allows the full range of human arm motion and has a total mass of less than 10 kg.