Eurobot Ground Prototype
The Eurobot Ground Prototype project is looking at the use of robotics for exploration missions, in preparing for human arrival and for robotic assistance during human exploration of a planetary surface.
A comprehensive test campaign has demonstrated the use of robotic technologies for exploration and to gain experience in robotic tasks in preparation for human arrival and for human-to-robot joint activities.
The rover and manipulators
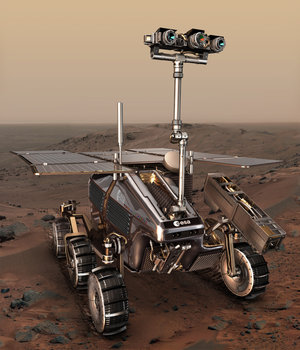
The Eurobot mobile system consists of a rover chassis with four wheels and a passive rotating joint between the front and back sections, to ensure that all wheels are in contact with the ground when driving on rough terrain.
The rover is powered by four electric motors and steered by two other actuators. With independent rear-wheel steering, the rover can be steered to rotate over the central axis of the robot, allowing the robot's 'torso' to be orientated toward the work area without moving the complete rover.

A stereo vision system mounted on a pan & tilt unit placed at about 2 m height is used for creating digital elevation maps. With the maps and platform inputs, the rover is able to navigate autonomously to a goal, avoiding obstacles.
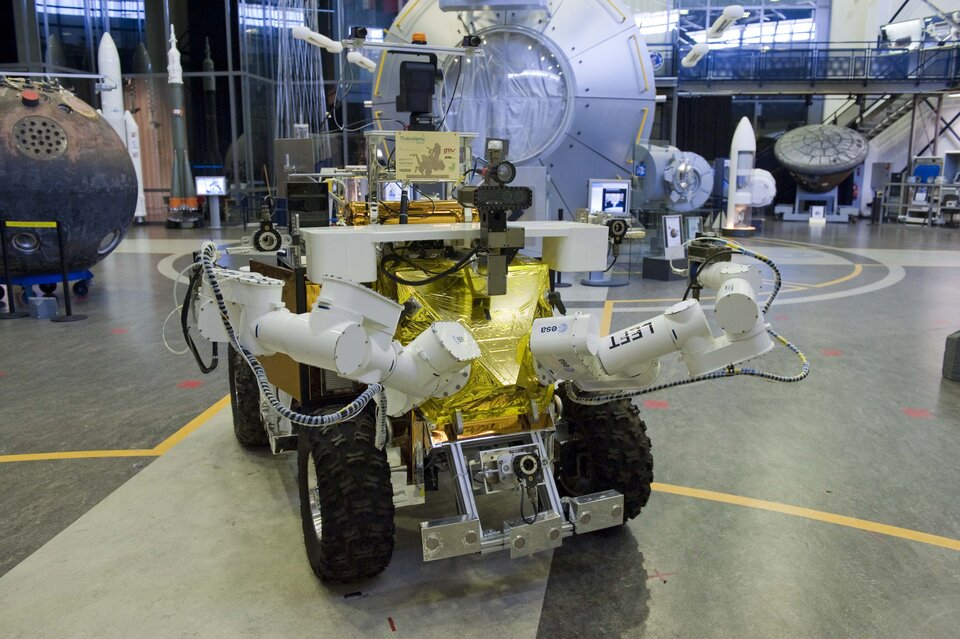
The front of the rover is a torso with two seven-joint arms. Both arms have a tool exchange system so that different end effectors can be used according to the work to be done.
At wrist level, each arm is equipped with two video cameras for automatic manipulation, visualisation and support of manual operations commanded by the operator from the control station.

On top of the robot torso, a second stereo vision system on a pan & tilt unit with light provides the human operator with a 3D view of the scene.
In the middle, the rover has a tray for carrying samples or payloads. An astronaut can step on to a rear platform to ride to a work site.
The current configuration can carry a space-suited astronaut weighing up to 150 kg.
The support segment

The monitoring and command system is used for mission preparation, execution and post analysis. The ground segment has a dual purpose for human and robotic missions.
For unmanned missions, time delays of a couple of seconds (typical for Moon-like scenario) are emulated. This is meant to represent the case where monitoring and commanding the EGP is done from the ground.
For human missions, the ground segment is used to emulate a Moon on-surface workplace. In this case, there is no delay.