











 Germany
Germany
 Austria
Austria
 Belgium
Belgium
 Denmark
Denmark
 Spain
Spain
 Estonia
Estonia
 Finland
Finland
 France
France
 Greece
Greece
 Hungary
Hungary
 Ireland
Ireland
 Italy
Italy
 Luxembourg
Luxembourg
 Norway
Norway
 The Netherlands
The Netherlands
 Poland
Poland
 Portugal
Portugal
 Czechia
Czechia
 Romania
Romania
 United Kingdom
United Kingdom
 Slovenia
Slovenia
 Sweden
Sweden
 Switzerland
Switzerland


























Remote Terminal Units
The Remote Terminal Unit (RTU) is a unit that is usually present on medium-large size spacecraft. The RTU offloads the On Board Computer from analogue and discrete digital data acquisition and actuators control tasks and it represents an example of implementation of distributed control system on board a satellite. The RTU is usually a not-intelligent unit (i.e. no microprocessors or microcontroller are hosted inside the RTU) and it is interfaced with the On-Board Computer with serial communication busses (MIL-STD-1553B, RS422, …) but there is a trend to have at least a micro-controller in RTUs in order to implement locally autonomous acquisition and control sequences.
The RTU System
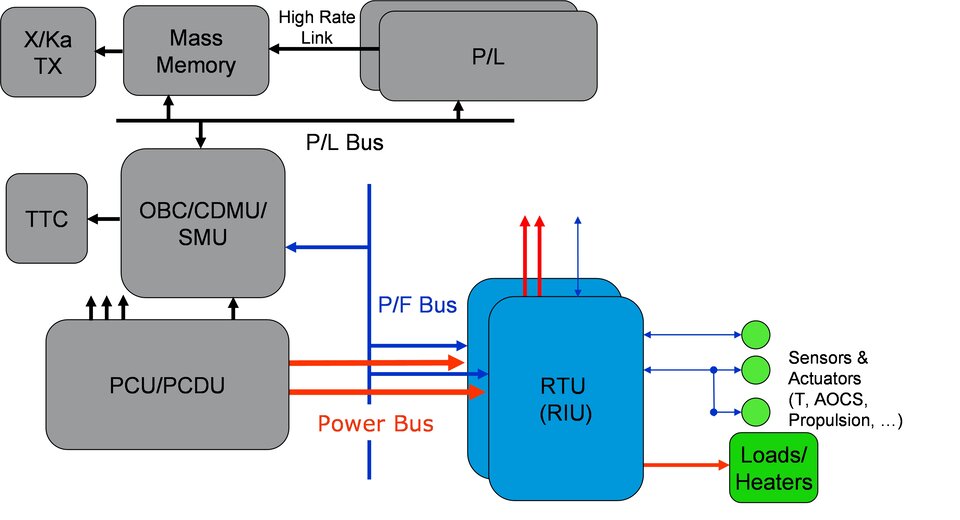
Fig.A shows the position of the RTU (also called RIU Remote Interface Unit) in the Avionics Data Systems of a typical mission scenario. The RTU is powered by the satellite Power Conversion Unit (PCU) or Power Conversion and Distribution Unit (PCDU) and it is controlled by the On-Board Computer Unit (OBC) through the platform bus. A not exhaustive lists of the typical tasks of a RTU is the following:
- to gather the analogue and digital telemetry from sensors and units (Temperature, Pressure, Digital Status)
- to provide the conditioning for analogue sensors,
- to control AOCS actuators and sensors (as Reaction Wheels, Gyros, Star Trackers, Sun Sensors, GPS, Magnetometers, Magnetotorquers),
- to control the Propulsion S/s,
- to control Solar Array Drive Equipments,
- to distribute power to heaters,
- to distribute (in some cases also down/converting) power to active loads
More than one RTU can be present on a S/C depending on the dimensions of the spacecraft and of the number and types of the functions that it has to provide. In several cases the RTU is fully integrated in the OBC from a mechanical point of view but from a functional point of view and also electrically it is separated by the OBC.
The RTU can control and monitor also P/L units or elements (e.g. Temperature sensors, Heaters lines) but in the majority of the cases a dedicated unit is foreseen that performs a subset of the functions usually implemented by the RTU ( an it has a different name: most frequently this unit is called Payload Management Unit-PMU).
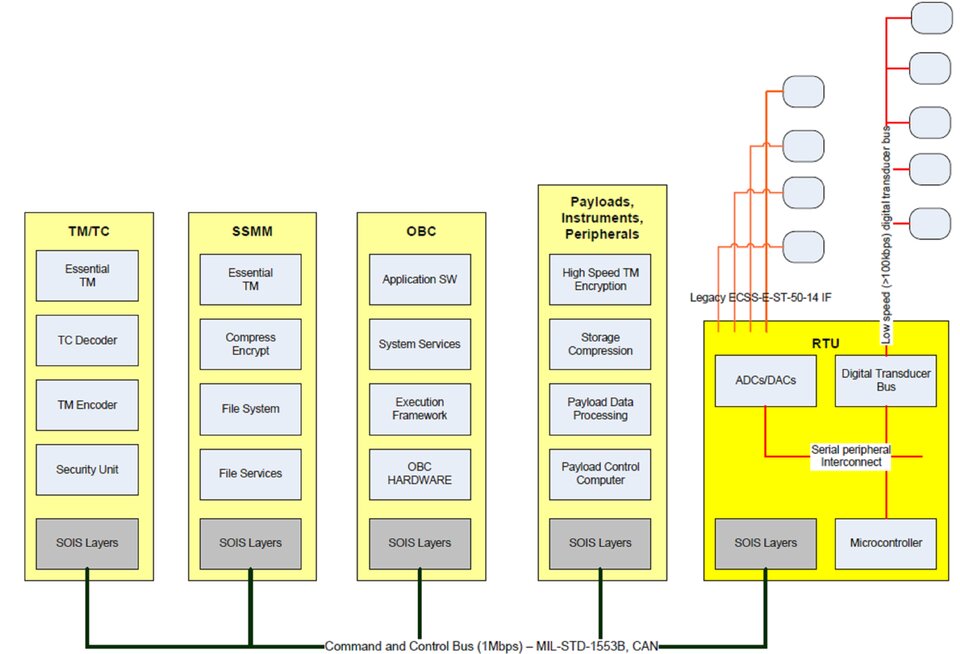
Fig.B shows a possible future RTU that includes digital sensor/transducer bus controller to acquire and control smart sensors.