











 Germany
Germany
 Austria
Austria
 Belgium
Belgium
 Denmark
Denmark
 Spain
Spain
 Estonia
Estonia
 Finland
Finland
 France
France
 Greece
Greece
 Hungary
Hungary
 Ireland
Ireland
 Italy
Italy
 Luxembourg
Luxembourg
 Norway
Norway
 The Netherlands
The Netherlands
 Poland
Poland
 Portugal
Portugal
 Czechia
Czechia
 Romania
Romania
 United Kingdom
United Kingdom
 Slovenia
Slovenia
 Sweden
Sweden
 Switzerland
Switzerland
























Implemented OSIP ideas — June 2020
ESA's Open Space Innovation Platform (OSIP) seeks novel ideas for new space research activities. Campaigns and Channels invite solutions to specific problems or ideas on more general topics, with those run by Discovery & Preparation, including the Open Discovery Ideas Channel, specifically looking for ideas that could be implemented as system studies, early technology developments, or PhD or postdoc research co-funded by ESA and a university.
In June 2020, the following ideas were implemented through the Open Discovery Ideas Channel:
| Quantum-enhanced data-driven framework for computational design of materials Delft University of Technology Spacecraft are exposed to intense radiation and harsh environmental conditions, and therefore must be made of sophisticated materials. Recently, data-driven approaches to design are showing great promise in discovering new materials and structures with unprecedented properties, but this can require enormous computing power. This project proposes to enhance the data-driven framework with quantum devices, which may lay the path to quantum computing. |
 |
 |
High-performance fault-tolerant computing for space KU Leuven The latest generation of communications systems onboard intelligent space missions require an increasing amount of computing power. In the near-future many systems will rely on complex algorithms and artificial intelligence which also require massive amounts of processing power. However, standard high-performance computers are sensitive to radiation, which is intense in space. This project aims to develop a new processor that will bring high performance computing from the ground to space without major overhead. |
| Bio-inspired robotic manipulation for grappling space debris Carleton University Removing space debris will require robust robotic grasping, but currently, most approaches to tactility in robotic grasping rely on either significant processing resources or soft robotics. This research co-sponsorship project aims to find out if it's possible to exhibit human-like tactility in the robotic grasping of space debris. |
 |
The following ideas were implemented through the OSIP Lunar Caves Campaign:
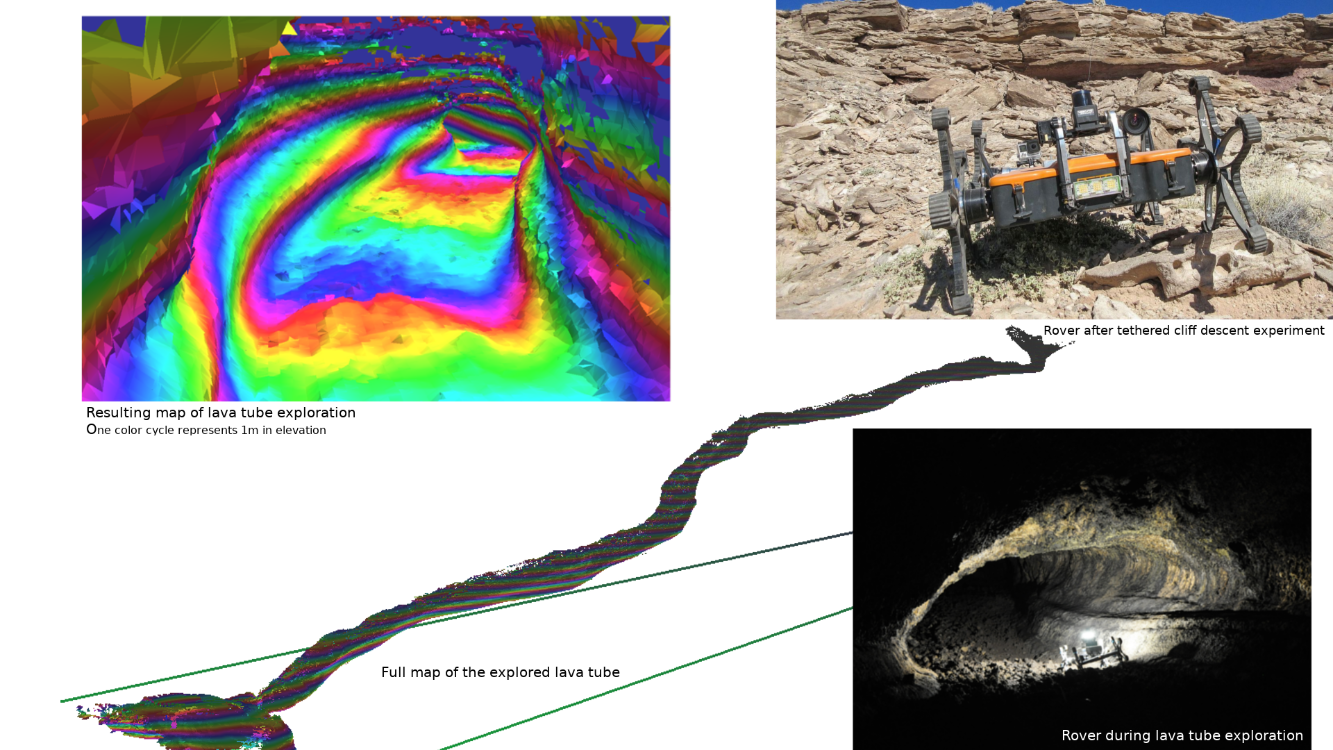
| Skylight: A tethered micro-rover for safe semi-autonomous exploration of lava tubes German Research Centre for Artificial Intelligence Lunar lava tubes are tunnels on the Moon that are thought to have formed during basaltic lava flows. This study aims to find an overall solution to access and map a lunar lava tube with a semi-autonomous rover. The study will further improve on existing results from previous projects, where parts of the proposed approach were evaluated, for example by mapping a lava tube on Tenerife. |
 |
 |
Rover-based system for scouting and mapping lava tubes from the Moon's surface using gravimetric surveying Canadensys Photographs of some lunar pit craters clearly show a cavern beneath the surface. This has raised the exciting possibility that at least some lunar pits are "skylights" into extensive lava tubes, however, there are also geologically plausible mechanisms for the existence of much smaller, more localised voids that are less useful to explore. This project proposes to first "scout" prospective lunar pits using a small, inexpensive lunar-surface rover mission to see whether it would be worth sending a more advanced mission. |
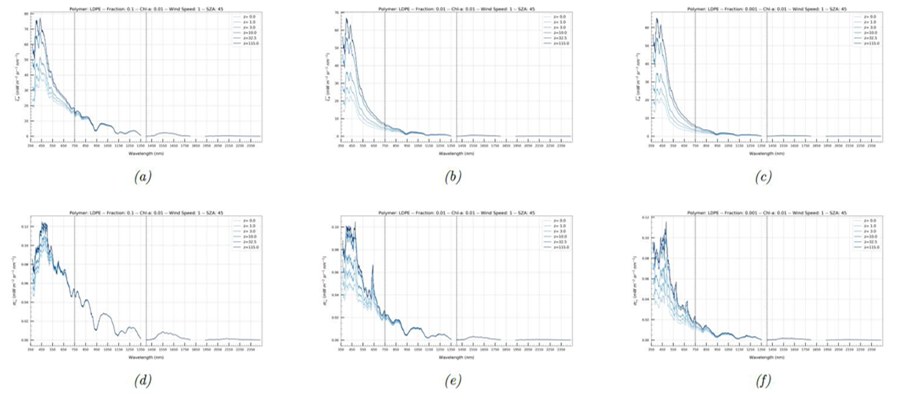
The following ideas were implemented through the OSIP Remote Sensing of Plastic Marine Litter Campaign:
| A simulator for marine litter observation from space Argans, Airbus, University of Oldenburg This project aims to specify, design and prototype a simulator to estimate the marine litter signal at the top of atmosphere from a set of bottom of atmosphere scenarios. By focusing on realistic case studies, the simulator will support the path towards a space mission dedicated to detecting marine litter. |
|
 |
Prediction of plastic hot-spots in coastal regions using satellite derived plastic detection, cleaning data and numerical simulations in a coupled system Polytechnic University of Catalonia, DHI GRAS By combining satellite data on hydrodynamic variables, light reflectance and water quality with regional coastal models, this project will develop a system focused on identifying plastic hotspots in coastal waters and on the shore. |
| Hyperdrone: Development of spectroradiometric proxies of shoreline marine plastic debris for satellite validation using remotely piloted aircrafts Plymouth Marine Laboratory, Scottish Association for Marine Science Developing instruments and algorithms for satellite remote sensing of ocean plastic needs standardised global in situ observations. This project plans to develop a standardised indicator for in situ radiometric detection of plastic debris on the shoreline, with a view to being deployed globally on different platforms. |
 |
 |
REACT: Crowdsourcing, Copernicus and hyperspectral satellite data for marine litter detection, quantification and tracking Planetek Italia, National Technical University of Athens, ARPA Puglia By fusing different types of satellite and in situ data, this project aims to develop a novel method to detect plastic litter at the shore or close to the shoreline, as well as offshore. |
| Using deep learning methods for plastic litter detection from satellite remote sensor Capgemini Technology Services The main objective of this project is to make it possible to automatically detect marine plastic litter patches in images from the Copernicus Sentinel-2 satellite using state-of-the-art deep learning methods (a subset of machine learning in artificial intelligence). |
 |
 |
Marine litter aggregation forecast Deep Blue Globe Marine litter detection based on satellite remote sensing is becoming a reality but the current state of the art is not mature. This research study aims to use expertise in artificial intelligence solutions based on space technology to simulate and perform a plastic concentration forecast which would then be studied in more detail thanks to multispectral data from the Copernicus Sentinel-2 mission. |
The following ideas were implemented through the OSIP Enabling Harbour to Harbour Autonomous Shipping Campaign:
| ANGELOS: Augmenting GNSS to prevent loss of service Nottingham Scientific This early technology development project aims to assess the feasibility of using VHF data exchange and ranging broadcasts to provide a global complementary system for position, navigation and timing. This would address the challenge of assuring robust and reliable position, navigation and timing for all phases of a shipping voyage and would be a significant enabler to achieving autonomy within the maritime domain. |
 |
 |
EO and GNSS data to improve navigation safety assessment Satellites & Advanced Technologies Engineering The project will quantify statistically the accuracy of the current GNSS information provided through automatic identification systems and to assess hazards in routes. The output will consist of an estimate of the benefit in terms of reduced risk of navigation when Earth observation data are exploited. This project will integrate various data sources to pave the way towards, and provide recommendations for, future autonomous shipping. |