ASCAT instrument design drivers
The main factors that drive the design of the instrument are:
- resolution cell size has to be controlled both in the cross-range and range directions (spatial resolution)
- radar measurements should be limited in their statistical variability (radiometric resolution)
- measurements should be calibrated within certain limits (radiometric accuracy)
- gain variation between pairs of beams should be carefully controlled (interbeam stability)
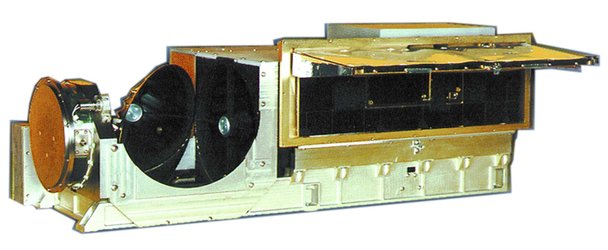
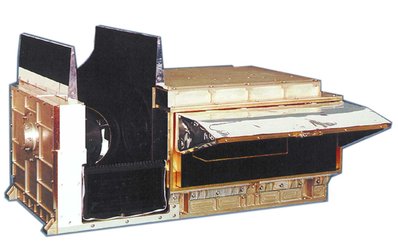
As with the ERS scatterometer, spatial resolution in the across-range direction is controlled primarily by design of the antenna azimuth footprint – this is one of the factors that lead to the use of such long antennas.
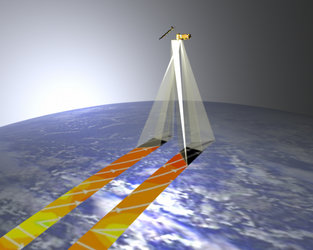
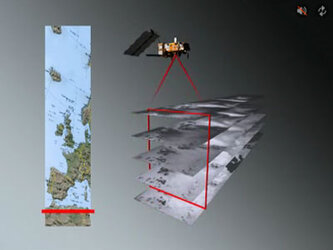
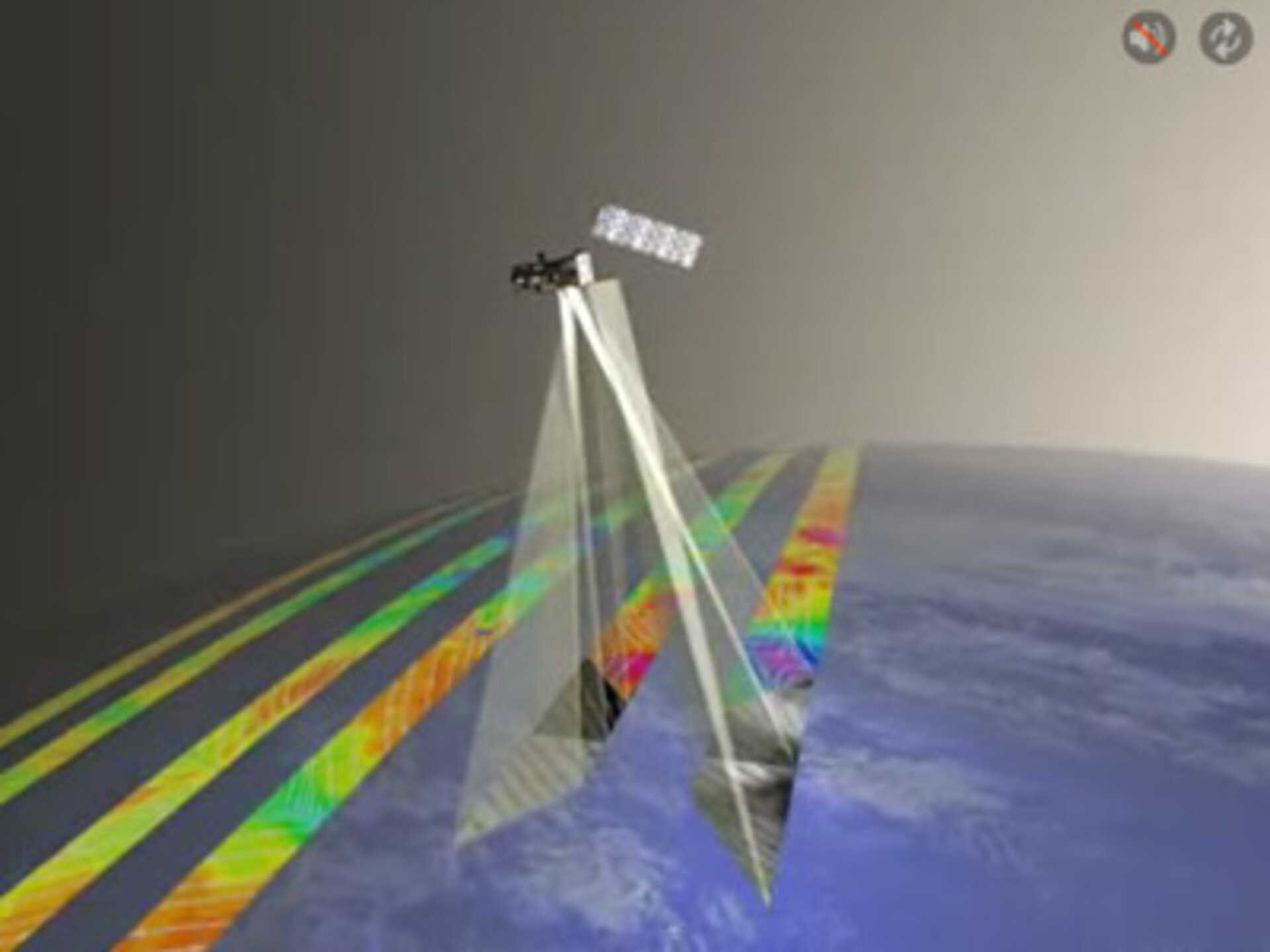
Spatial resolution in range, in contrast to ERS which used temporal sampling of the received echoes from short, high power transmitted signals, uses a frequency modulation technique in conjunction with relatively long, medium power transmit pulses. The technique illustrated in the diagram considers how two radar (point) targets at differing ranges are identified.
The radar transmits a pulse whose frequency varies linearly over the pulse duration. Due to the differing ranges of the two targets, two linearly frequency modulated echo signals arrive at the radar receiver separated in time, (the orange and green lines on the diagram). When mixed with a local oscillator signal having the same characteristics as the transmitted signal, two mixing products are produced, f1 and f2, which map to the different target ranges. This process is known as 'de-chirping'.
Radiometric resolution is determined by the combination of:
- echo signal-to-noise ratio
- number of independent echo samples
Choice of transmitter peak power (120 W) and transmit pulse duration (@ 10 ms) are two factors which ensure that an adequate signal to noise ratio and a sufficient number of independent samples are available.
Radiometric accuracy and Interbeam stability are closely related. To achieve these objectives the on-board hardware should be stable. A large part of the hardware is therefore supervised by means of a calibration signal. This signal is derived by sampling the transmitted power and injecting a signal of similar magnitude into the receiver input. By examining the calibration signal at the receiver output it is possible to detect changes in the product of the transmitted power and receiver gain and hence to correct for instabilities in these parameters.