About ESA
The European Space Agency (ESA) is Europe’s gateway to space. Its mission is to shape the development of Europe’s space capability and ensure that investment in space continues to deliver benefits to the citizens of Europe and the world.
Highlights






Latest





Space in Member States
Find out more about space activities in our 23 Member States, and understand how ESA works together with their national agencies, institutions and organisations.
 Germany
Germany
 Austria
Austria
 Belgium
Belgium
 Denmark
Denmark
 Spain
Spain
 Estonia
Estonia
 Finland
Finland
 France
France
 Greece
Greece
 Hungary
Hungary
 Ireland
Ireland
 Italy
Italy
 Luxembourg
Luxembourg
 Norway
Norway
 The Netherlands
The Netherlands
 Poland
Poland
 Portugal
Portugal
 Czechia
Czechia
 Romania
Romania
 United Kingdom
United Kingdom
 Slovenia
Slovenia
 Sweden
Sweden
 Switzerland
Switzerland
Science & Exploration
Exploring our Solar System and unlocking the secrets of the Universe
Go to topicAstronauts











Latest









Enabling & Support
Making space accessible and developing the technologies for the future
Go to topicLatest




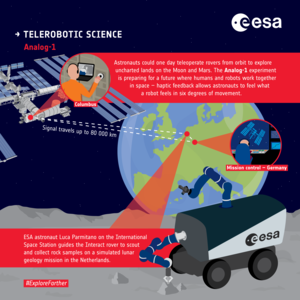
Analog-1 getting ready
In a series of experiments, collectively called Analog-1, the International Space Station will be used as a stand-in for a spacecraft in orbit around another planetary body, such as the lunar Gateway. From here the next wave of exploration of our Solar System will see humans exploring ‘hand-in-hand’ with robots. Robotic scouts guided from lunar orbit can safely investigate uncharted areas and prepare the land for human explorers to set up camp.
The same approach could also be used to explore Mars and other planets, transplanting human intelligence and agility to alien surfaces without the expense and potential hazard of landing.
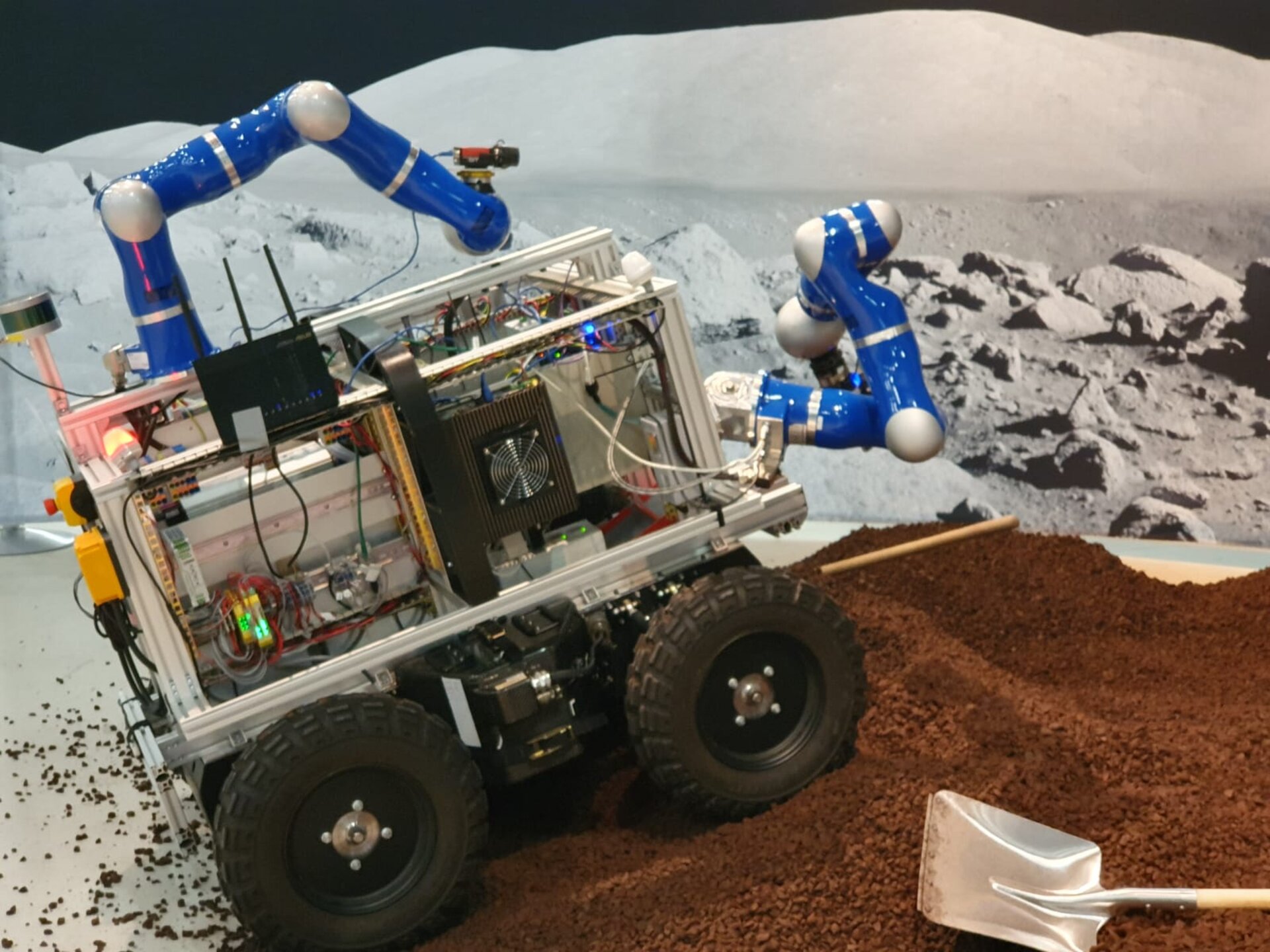
The Interact rover pictured here will be commanded by ESA astronaut Luca Parmitano in space as part of ESA’s Multi-Purpose End-To-End Robotic Operation Network, Meteron, project to develop the technology for human and robotic exploration.
Using a specially-developed ‘space internet’ the signal from the Space Station will travel up to 10 000 km one way to the ground, but Luca will still be able to see and even feel what the robot does despite a considerable time delay.
If all goes well and Luca passes his driving test, he will do a full simulation to put Meteron to the test: can Luca command the robot to do a geological survey of interesting areas in the simulated lunar landscape?
The Analog-1 experiment is proving the value of human-robotic cooperation in space and demonstrating the technology that will be used as the basis for many of ESA’s exploration projects. Ministers from ESA’s Member States will convene later this month at the Space19+ in Seville, Spain, to decide on the Agency’s future course.
If all goes well and Luca passes his driving test, he will do a full simulation in about a week’s time to put Meteron to the test: can Luca command the robot to do a geological survey of interesting areas in the simulated lunar landscape?