Applications in Earth Orbit
Automation and Robotics systems are today used in low Earth orbit, mainly for building and operating the International Space Station. On the ISS two categories of use are possible:
- Module Internal Robotics
- Module External Robotics
Use of Automation and Robotics means is likely to be extended to higher orbits in the servicing of spacecraft for Telecommunication and Navigation
Module External Robotics
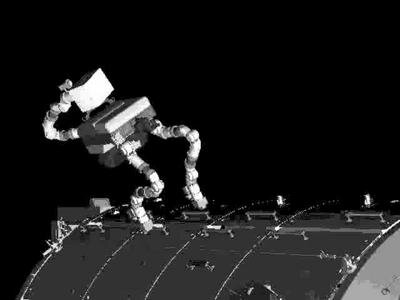
The A&R elements belonging to this category provide manipulation and transportation capabilities to assemble, operate and maintain hardware comprising the outside part of Space Laboratories. These elements may range from small robot arms equipping scientific facilities to large arms capable of handling the large structural hardware making the International Space Station (ISS). ESA has developed the European Robot Arm to function on the Russian part of the ISS ESA has also studied several smaller External Robotics means such as EuTEF and EUROBOT.
Module Internal Robotics

Space A&R that falls in this category provides manipulation ability to operate equipment inside Microgravity Space Laboratories.
The equipment may be originally designed for crew (Astronauts) and for robotic operations.
Space Laboratories are generally composed of separate payloads which investigate specific microgravity sciences e.g. Material Science, Fluid Science, Biology and Physiology.
Payloads are generally composed of storage areas, processing facilities and diagnostic instruments.
In operational terms, a typical cycle of scientific investigation can be broken down into the following activities:
- Prepare facility for processing
- Retrieve test sample from storage area and place it in a processing facility
- Process the sample
- Retrieve the sample from facility and store it
The type and order of activities may change, according to the payload. However, for a given payload these activities need to be performed for several samples. The Automation and Robotics Section at ESA has developed much technology and experience in support of Module Internal Robotics
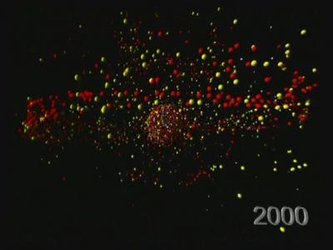
Geostationary Servicing

The geostationary orbit (GEO) has a high commercial and strategic value and the satellite systems using it for telecommunication, TV broadcasting and weather forecasting represent a significant value in terms of capital investment and revenues. The unique characteristics of GEO makes it the most crowded orbit around earth. In January 2002 there were 900 reported objects in GEO of which only about 28% were controlled, operational satellites. The high concentration of satellites, the great potential for failures and the ease of moving between objects in GEO made attractive the idea of a multi-satellite repair vehicle (similar to a roadside rescue service). ESA has studied several Geostationary Servicing concepts since the early '90s.
MEO Constellation Servicing
Satellite navigation systems such as USA's Global Positioning System (GPS) and the European Galileo, have large constellation of satellites in Medium Earth Orbit (MEO). The Galileo constellation will be deployed into 3 orbit planes located respectively at 0°, +56°, -56° inclination and comprising each 9 operational satellites and one spare. Based on the experience of the Global Positioning System (GPS) constellation, it is possible to conceive that the high-precision clocks may require some technological upgrade. The ESA A&R section has investigated the use a servicing vehicle capable to replace/upgrade the high-precision clocks of all satellites in a single orbit plane.