
European IMU Breadboard
| Programme: | TRP Workplan, | Achieved TRL: | 5 |
| Reference: | T905-014EC | Closure: | 2016 |
| Contractor(s): | Astrium (FR), SEA (GB) | ||
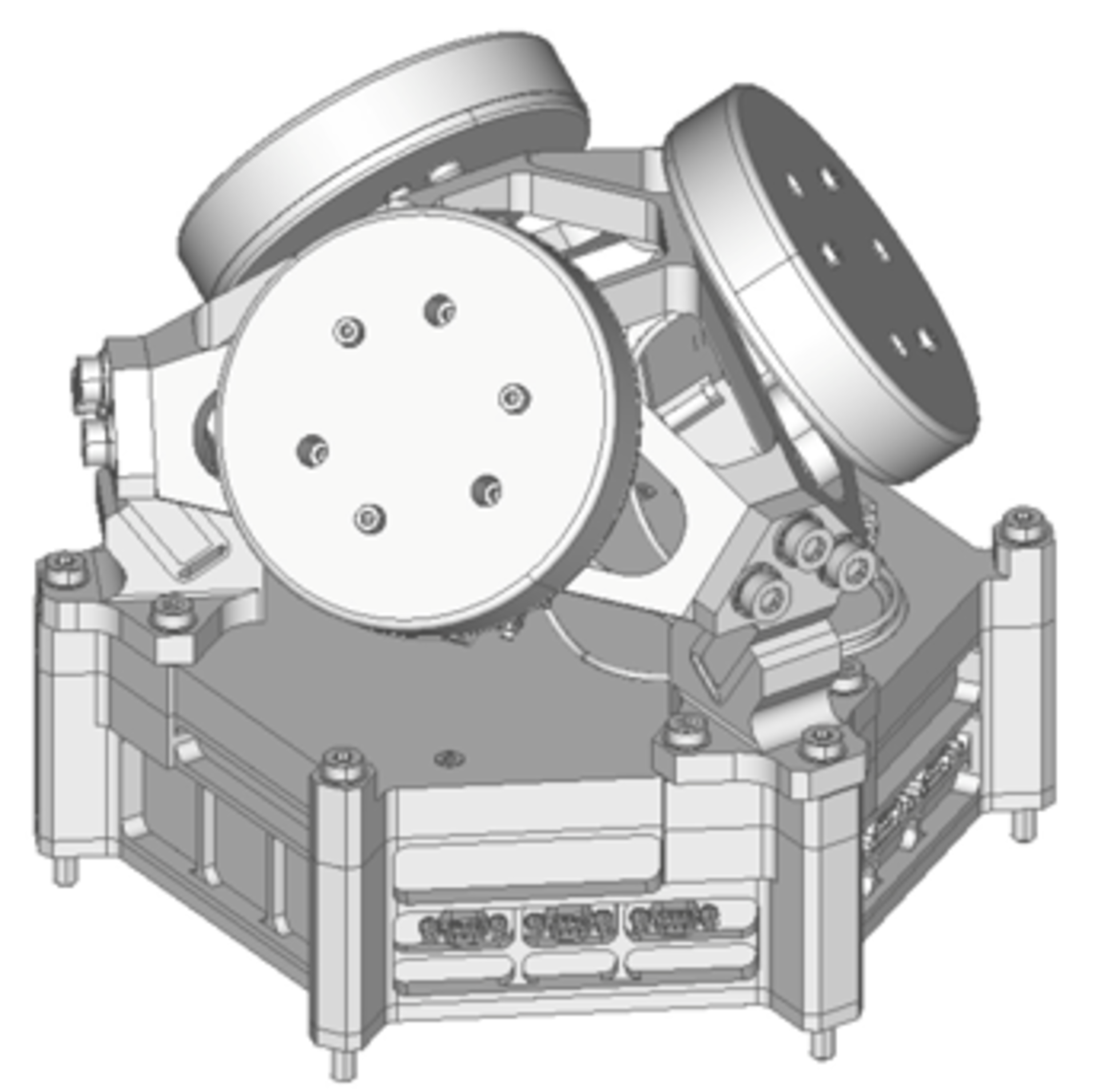
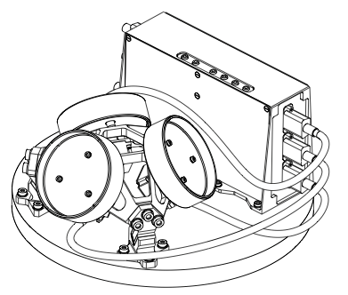
An IMU, consisting of 3 gyro axes and 3 accelerometer axes, is a critical technology to enable future exploration missions during cruise, aerobraking, entry, descent and landing. No European IMU products are currently available on the market. The exploration mission scenarios require a high accuracy and low mass equipment.
Objective(s)
The objectives of the activity are to perform a preliminary unit design, to build and test a breadboard, to fly a demonstrator on the MASER13 sounding rocket, and to produce a development plan for a flight model.
Achievements and status
Within the activity, trade-offs and a preliminary design of an FM were done, based on the heritage 90mm fibre-optic gyro (FOG) and on the ESA-funded SA0120 MEMS accelerometer. A prototype including 3 functional accelerometer channels and electronics has been demonstrated on the MASER13 sounding rocket. Detailed performance tests were done on various hardware breadboards de-risk further development.
Benefits
A European IMU is a critical sensor for planetary landing missions, and can furthermore be applied to launcher navigation, as well as spacecraft delta-v monitoring during delta-V maneuvers and planetary fly-bys.
Next steps
Maturation of the accelerometer components; Engineering Model (EM) design, manufacturing and testing; recurring cost reduction (e.g. COTS components).

