
New test bed improves GNC verifications
A GSTP activity with ASTOS Solutions GmbH in Germany, has designed and developed a reconfigurable and high-fidelity testing facility for guidance, navigation and control (GNC) system verification.
The activity’s goal was to achieve a faster, less expensive, more flexible and more modern GNC verification and validation, which is designed for industrial maintainability and long-time availability.
The resulting testbench makes use of commercial-off-the-shelf iterms and supports Model-in-the-Loop (MIL), Processor-in-the-Loop (PIL) and Hardware-in-the-Loop (HIL) verification types. It also allows testing in open-loop and closed-loop configurations. The facility is modular, supporting fast and flexible scenario configuration, and is movable and re-locatable.
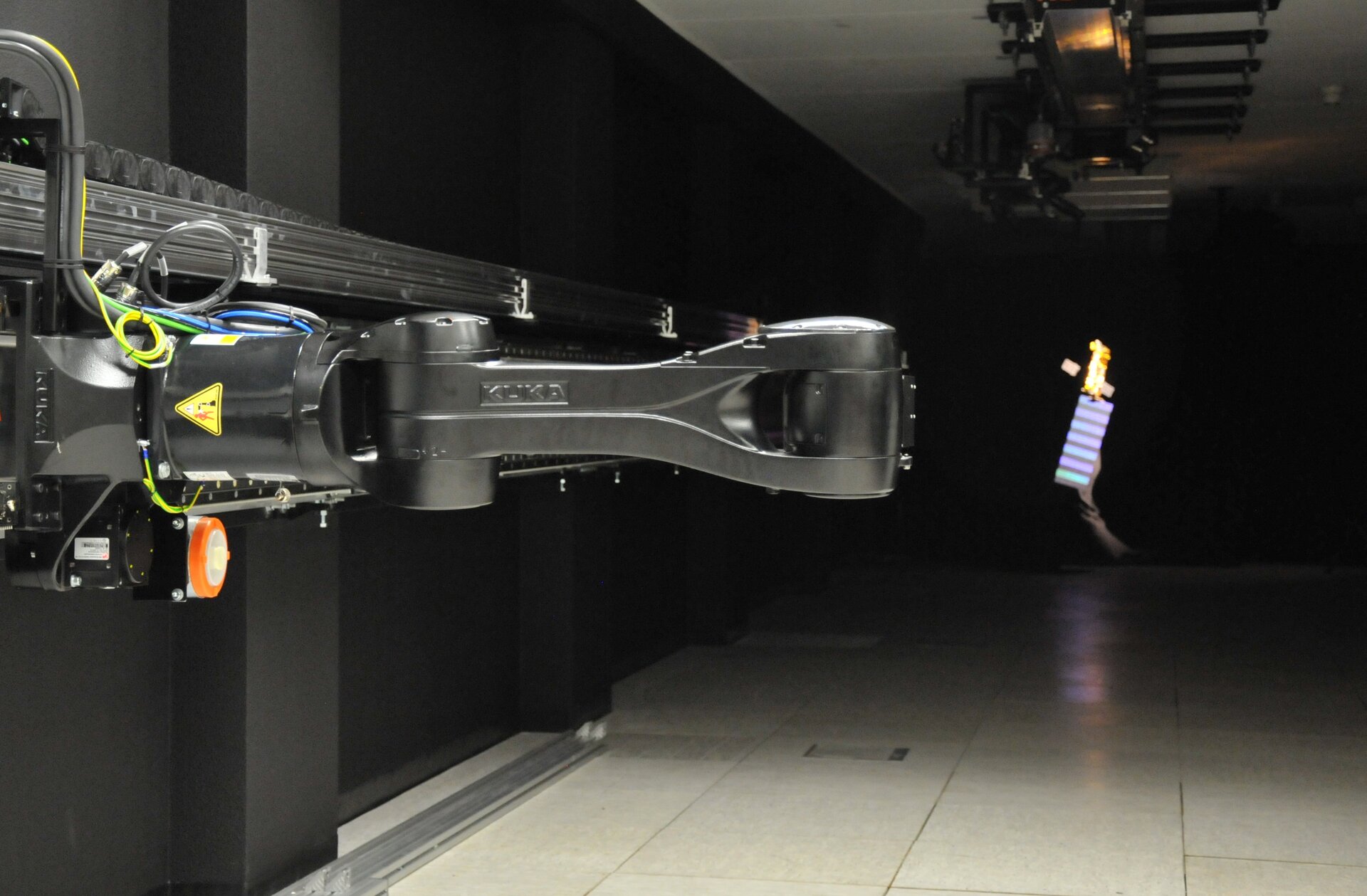
The test bench, consisting of a control workstation and processing unit, demonstrated its capabilities in the GRALS facility of the ESTEC GNC Laboratory, where it has been connected to the KUKA robot arm.
To connect the robot arm of the GRALS facility to the simulator a set of Simulink blocks were developed. Based on the simulated scenarios the blocks are responsible to command the position and attitude of the robot arm’s end-effector. The blocks handle all required transformations and scaling factors and can be used for both platforms, MIL and HIL.
Overall, the new test bench will allow for faster, less expensive and more flexible GNC verification and validation. Next, it will be further developed and distributed for all kind of space flight missions.