ATV Johannes Kepler
Editor's note: This page is no longer being updated, but will be preserved as a record. Click here for the latest information on ATV.
| ROLE | ISS resupply & reboost |
| LAUNCH/END DATES | 16 February / 21 June 2011 |
| LAUNCHER/LOCATION | Ariane 5/Kourou, French Guiana |
| LAUNCH MASS | 10 470 kg (empty) | 20 050 kg (launch mass) |
| ORBIT | Transfer and phasing to dock with ISS |
| NOMINAL MISSION | 4 months |
| + ATV is the first vessel to dock automatically with the ISS and is the largest ISS supply vessel + | |
The Automated Transfer Vehicles (ATV) are probably the most complicated series of spacecraft ever built in Europe. The ATV-series are launched and operated by the European Space Agency. Their complexity comes from the nature of their mission and the constraints imposed by their destination, the International Space Station (ISS).
Like all ATVs, ATV-2 — dubbed Johannes Kepler — is designed to carry over seven tonnes of experiments, fuel, water, food and other supplies from Earth to the ISS orbiting at about 350 km. When it arrives, it becomes a 22-cubic-metre extension to the ISS, giving extra space for the six astronauts and cosmonauts who form the permanent ISS crew.
Whilst attached, apart from transferring its cargo to the ISS, the ATV also gets loaded up with solid and liquid waste from the station; its thrusters are used to periodically boost the ISS orbit (which decays with time) and it can also be used for emergency manoeuvres, such as those required if a piece of space debris is predicted to hit the station.
After about six months, the ATV is undocked from the ISS, and undergoes two carefully planned manoeuvres, which direct it on a trajectory that will cause it to burn up harmlessly in the atmosphere over an uninhabited area of the Pacific ocean. The first ATV, Jules Verne, was launched on 9 March 2008 and reentered the atmosphere on 29 September 2008. Johannes Kepler flew its mission between 16 February and 21 June 2011.
The ATV Control Centre (ATV CC) is located at the CNES (Centre National d'Etudes spatiales - France's space agency) facility in Toulouse, France.
The Mission Operations Team

The ATV Mission Operations Team works at ATV-CC and comprises a mixed ESA-CNES team. Experienced ESA operations and ground controllers work as Mission Directors and in training, simulation and flight dynamics, while CNES operations engineers work under the CNES Flight Director in areas such as attitude and orbit control, propulsion and telecommunications. ESA's lead Mission Director is Kris Capelle.
Beginning in 2009 with ATV-2, an industrial consortium - referred to as the IOT (Industrial Operations Team) - has been working closely with, and conducting operations for, the ESA-CNES team.
Other teams at the CNES centre in Toulouse support ATV operations in the areas of flight dynamics, training, systems engineering and software development and maintenance.
Mission operations overview
Since ATV will approach and be attached to the ISS, safety is paramount. Most spacecraft functions are doubly redundant, meaning that each subsystem, unit, switch and valve is duplicated - so that the spacecraft can withstand any single failure.
Since anything associated with the ISS must be designed to be triply redundant, ATV is designed to cope with two simultaneous failures.
For example, the ATV propulsion system has both main and redundant thrusters to power it during docking with the ISS. In case both the main and redundant thrusters fail, it has a completely separate, alternative thruster system, controlled by completely different hardware and software.
This system is used particularly if it appears that ATV is not going to dock properly with the ISS. If anything goes wrong, an 'Escape' or a 'Collision Avoidance Manoeuvre' (CAM) can be commanded by ground controllers, by astronauts on the ISS or by the ATV itself, acting autonomously. During an Escape, the normal thrusters are used to bring ATV away from the ISS into a safe parking orbit; during a CAM, the backup thruster system does essentially the same thing.
Much of the complexity of the first ATV mission came from proving that these Escapes and CAMs worked correctly. Only when all of these vital safety operations had been tested, during a 3-week flight campaign, and proven to work flawlessly, was ATV-2 allowed to dock with the ISS. This time ATV-2 will go directly to Station.
Launch and LEOP
The mission starts with the Launch and Early Orbit Phase (LEOP), when the spacecraft is put into a low Earth orbit by Ariane 5. This is probably the most risky part of the mission, especially until ATV has deployed its four solar array panels used to generate the power necessary to control the spacecraft.
After LEOP, the spacecraft performs a series of manoeuvres to bring its orbit into phase with the ISS, approaching it from behind and slightly below.
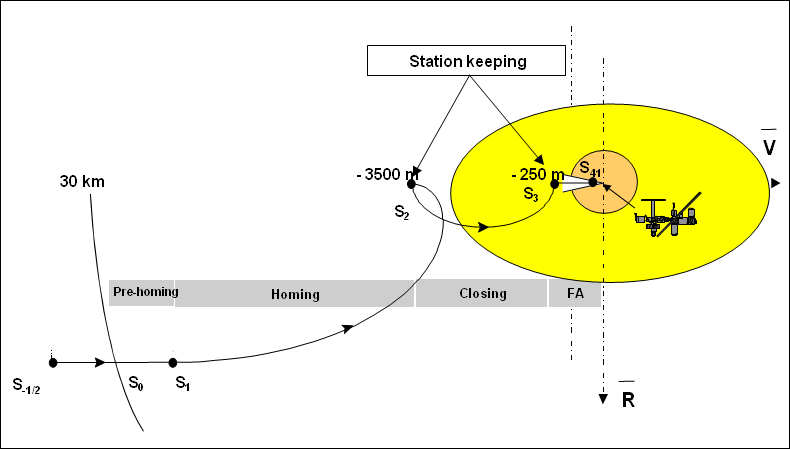
The approach to the ISS is characterised by a series of way-points and station-keeping manoeuvres, which are numbered from S-1/2 (at about 40km from the ISS and marking the start of proximity operations) to S41 - only 12m from docking.
When ATV reaches S-1/2 (around 40 km behind and 5 km below the ISS), GPS receivers on ATV and the ISS are used to calculate the relative positions of the two bodies. ATV starts a pre-homing phase, passes through S0 (30 km from the ISS), performs the homing phase and stops at station keeping point S2, located 3.5 km behind and 100 m above the ISS.
When all checks at S2 are completed, a 'Go' command to proceed to S3 (250m behind ISS) is sent to ATV.
- Further checks are performed at S3, and a switch is made to high-performance sensors for control of the final approach.
- After successful checks at S3, ATV will begin its linear translaion into the next hold point (S4, at 25m from the ISS).
ATV will then proceed to S41 (11m from the ISS) and commence docking under permanebt monitoring by the ISS crew and ATV-CC. ATV docks to the Russian Zarya module.

Attached phase
Once attached, the spacecraft is continually monitored. It carries gases and ISS propellant, which are transferred to the ISS during the attached phase along with up to 1600 kg of experiments, and up to 6340 kg of waste material is loaded for the return journey (see specifications below).
For the mission of ATV-2, no water is being delivered to the ISS as none is needed.
During the attached phase, ATV uses its thrusters to correct and adjust the orbit of the 400-tonne ISS structure and to perform debris avoidance manoeuvres when necessary.
Deorbiting
Once ATV undocks from the ISS, it conducts a series of deorbit burns which will cause the vessel to plunge to a fiery end in the upper atmosphere.
| ATV Platform & Payload | |
|---|---|
| Propulsion | |
| Main propulsion: | 4 x 490N thrusters |
| Thrusters: | 28 x 220N for Altitude control & braking |
| Dimensions | |
| Length (with adaptor, probe retracted): | 10 770 mm |
| Largest diameter: | 4 480 mm |
| Solar arrays span: | 22 281 mm |
| Mass budget | |
| Vehicle dry mass: | 10 470 kg |
| Max. lift-off mass | 20 050 kg |
| Load, total | 7667 kg |
| Inside pressurised module: | 5500 kg |
| Water: | 840 kg |
| ATV-2 launch configuration | |
|---|---|
| Cargo mass | Dry cargo: 1599 kg |
| Water: 0 kg | |
| Gas (N2, O2, air, 2 gasses/flight): 100 kg | |
| ISS refuelling propellant: 850,6 kg | |
| ISS re-boost and attitude control propellant: 4535 kg | |
| Launch vehicle | Ariane 5 (300x300 km & 51.6° transfer orbit) |
| ATV-1 launched with solar panels folded to the body of the spacecraft | |
| Launch site | Kourou, French Guiana |
| Launch date | 15 February 2011 |