En route to exploring lunar caves
Last year, we asked for your ideas to detect, map and probe caves on the Moon. We selected five of these ideas for further investigation; together they will help us map the direction we should take to develop a mission to explore lunar caves.
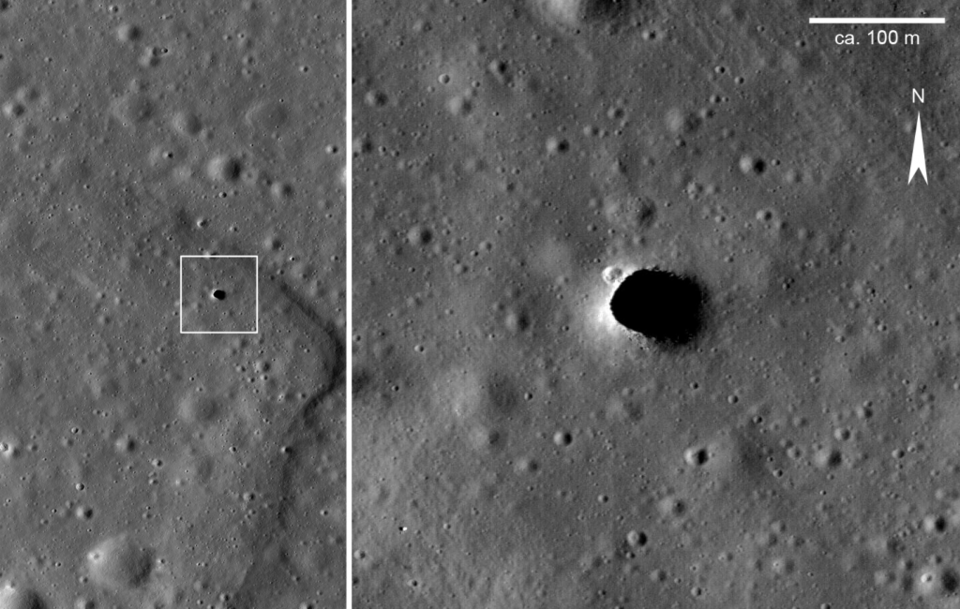
The Moon's surface is covered by millions of craters, but it also hosts hundreds of very steep-walled holes known as pits. Like doorways to the underworld, photos of some pits clearly show a cavern beneath the Moon's surface, suggesting that they are 'skylights' into extensive lava tubes that can be as wide as New York's Central Park, and could extend for hundreds of kilometres. These tubes are thought to have formed during lava flows billions of years ago, when the Moon was still geologically active.
Whilst the Moon's barren surface has been well-documented by orbital spacecraft, subsurface cavities remain a mystery but could be vital in our future exploration of the Moon. Not only could they provide shelter for human visitors – shielding astronauts from radiation and micrometeorites, they may also provide access to icy water and other resources trapped underground.
Even so, we need more information about lunar caves before we can set up camp there. This information will be provided by future human and robotic exploration missions, and the five selected studies are an early step towards achieving such a mission.

Beyond the ability to access and navigate lunar caves, the mission would need a communication line between the outside world and the inside of the cave, a system to power the rovers inside a cave, and instruments that make useful measurements of the cave environment.

"We've developed a suggested baseline scenario for a lunar cave mission, which would include three key stages," explains Francesco Sauro, a planetary geologist and speleologist who is an expert on lunar lava tubes and technical course director of ESA's CAVES and PANGAEA training programmes.
"The first stage would be to scout out the rim of a pit leading to an underground cave and find a safe place to access it. Then a probe would be deployed into the pit, making measurements of the pit walls as it descends. Finally, the probe would explore the pit floor, find a way to access the lava tube and perform science experiments within the cave to find out more."
The five SysNova studies – proposed as ideas via ESA's Open Space Innovation Platform – address different phases of this mission scenario. They are being led respectively by the German Research Center for Artificial Intelligence (DFKI), Canadian Aerospace corporation Canadensys, the University of Manchester, the University of Oviedo and the University of Würzburg. Details about each study can be found at the end of this article.
Canadensys is investigating a rover that would scout and map lava tubes from the Moon's surface by measuring the gravitational field around pits. Once a pit leading to a lava tube is found, the mission could use a rover like that proposed by the University of Manchester that – rather than using wheels to move around as traditional rovers do – would instead hop around complex terrain to avoid getting stuck or falling over. Such a rover could be used to explore and image the rim of a pit, to find the safest entry point.
At this point, the rover could deploy a probe inside the pit. The team from the University of Oviedo is investigating a rover equipped with a crane to lower the probe into the pit avoiding the risk of unstable rims. DFKI, on the other hand, is investigating using a tether to deploy the probe. Both the crane and the tether would then provide a communication link and power to the probe via the surface rover.
DFKI's proposed tether ends in a probe – taking the form of a semi-autonomous rover – that could explore a cave leading away from the pit. The University of Würzburg team also proposes using a tether and probe system, with the probe being a sphere that would explore and characterise the entrance, the walls and initial part of lunar lava tubes. Both probes would carry cameras and a science payload, as well as the important ability to navigate and map the pits and tubes. The University of Manchester's small, agile hopping rovers would also create maps by working together in a network.
"We are really excited to see how these studies pan out, and to discover how they will contribute to our planning of a mission to explore lunar caves," concludes Loredana Bessone, Technical Officer for the studies and Project Manager for ESA CAVES and PANGAEA. "It's fantastic to work with academia, research institutes and industry to achieve this ambition. They bring their perspective and insight into this complex and forward-thinking project; we will try to integrate their developments into a feasible mission concept through a study that will start early next year in ESA's Concurrent Design Facility, and who knows, we may test some of these technologies in one of the next PANGAEA-X test campaigns."
Studies
| Skylight: A tethered micro-rover for safe semi-autonomous exploration of lava tubes German Research Center for Artificial Intelligence (DFKI)
|
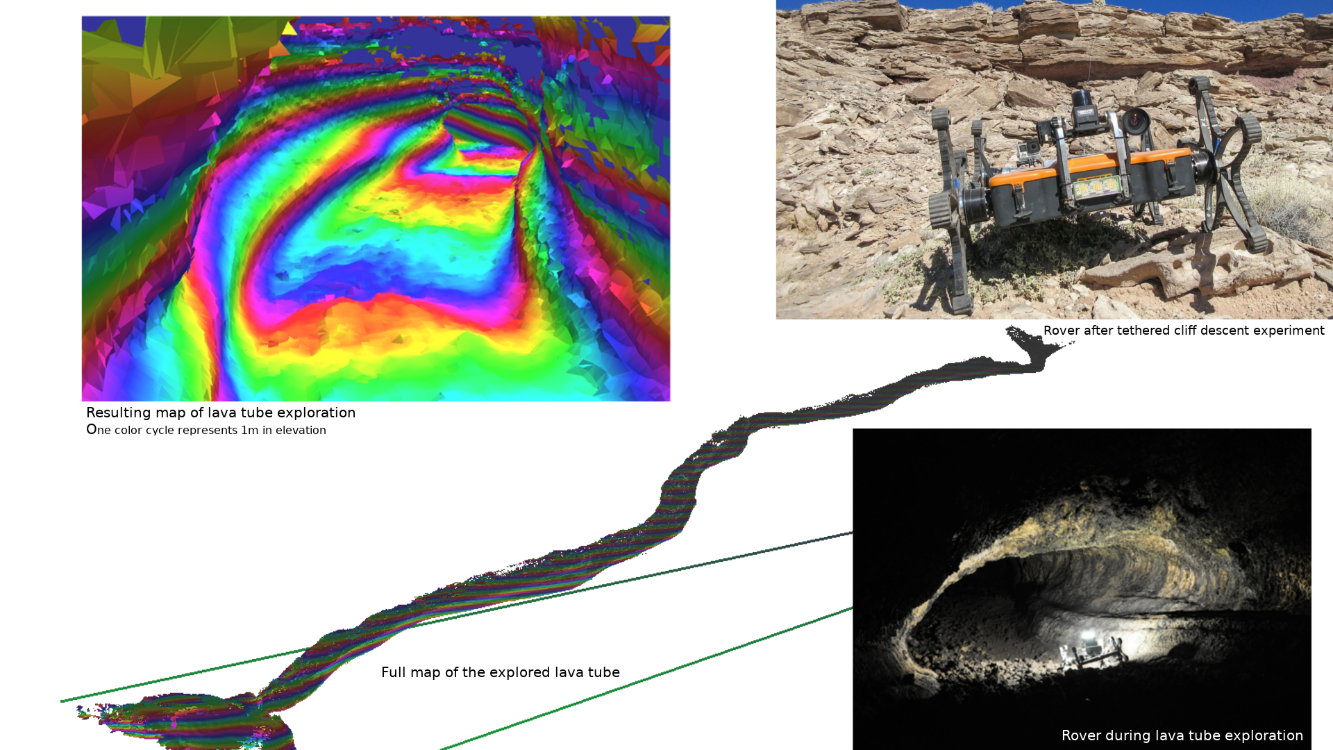
Carried out by the Robotics Innovation Center of the DFKI together with the Robotics Group of the University of Bremen, this investigation aims to find an overall solution to access and map a lunar lava tube with a semi-autonomous rover. The concept involves entering a lava tube using a tether system that also provides communication and energy. When the bottom is reached, the tether spool is deployed and serves as a recharging station and communications relay for the battery-operated rover. This study will further improve on existing results from previous projects, where parts of the proposed approach were evaluated, for example by mapping a lava tube in Tenerife. |
| Canadensys
|
Photographs of some lunar pit craters clearly show a cavern beneath the surface. This has raised the exciting possibility that at least some lunar pits are ‘skylights’ into extensive lava tubes, however there are also geologically plausible mechanisms for the existence of much smaller, more localised voids that are less useful to explore. This project proposes to first scout out prospective lunar pits using a small, inexpensive lunar-surface rover mission that would measure the gravitational field around pits to search for the presence of lava tubes. This information would be used to plan a more advanced mission that can enter tubes via pits. |
| Hopping rovers for lunar exploration University of Manchester
|
Traditional planetary exploration missions involve a single rover platform with wheels that can move across moderately uneven terrain. More extreme rocky surfaces are challenging, and the risk of the lone rover becoming lodged or toppling is high. Inspired by biology, this study will investigate a network of low-cost, low-mass agile hopping rovers that can vault and bounce in complex terrain. Each rover would be able to operate independently while also communicating with nearby rovers to share navigation and mapping data, using a range of complementary sensing packages, which could be deployed across the rover network. |
| Robotic crane for wireless power and data transmission between surface and cave University of Oviedo
|
Powering rovers inside lunar caves can be challenging, as they are not exposed to the sunlight that is traditionally used as a power source. This study will investigate a system that would involve a unit on the Moon’s surface equipped with a solar panel large enough to supply energy to itself as well as to charge the batteries of robots operating inside the cave. The surface unit would send power wirelessly to the robots in the cave using a crane that goes into the cave and deploys a ‘charging head’. |
| Descent and exploration in deep autonomy of lava underground structures University of Würzburg
|
This mission concept aims to explore and characterise the entrance and initial part of lunar lava tubes using a compact, tightly integrated spherical robotic device, with a complementary payload set and autonomous capabilities. It specifically addresses the identification and characterisation of potential resources for future ESA exploration missions, the local environment of the subsurface and its geological and compositional structure. The sphere will house laser scanners, cameras and supporting equipment, and will be lowered into the skylight to explore the entrance, associated caverns and pipes. Lidar systems will produce 3D models of the environment; this will be the primary exploration toolset within the sphere. |